L04: Sampling-based Planning скачать в хорошем качестве
L04: Sampling-based Planning
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: L04: Sampling-based Planning в качестве 4k
У нас вы можете посмотреть бесплатно L04: Sampling-based Planning или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон L04: Sampling-based Planning в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
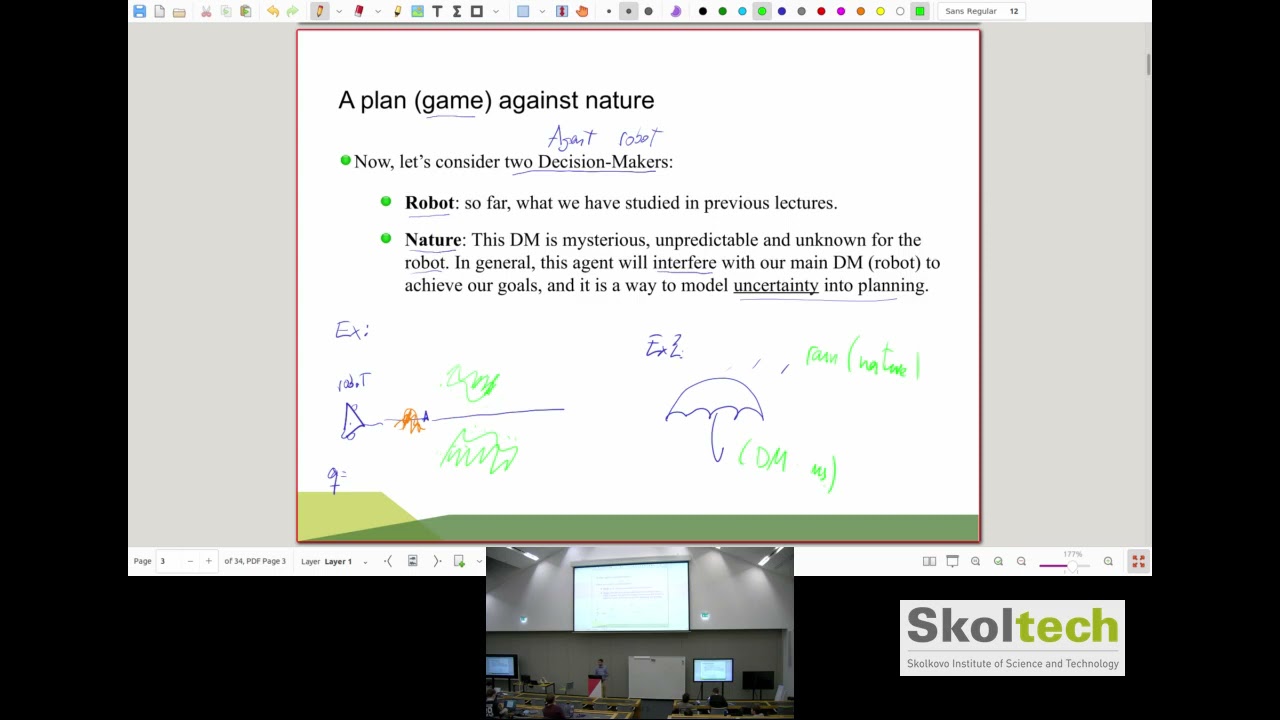
L04: Sampling-based Planning
This lecture is part of the MSc in Data Science at Skoltech, year 2021-2022. List: • Planning Algorithm in AI and Robotics, Sko... Topics: Continuous state space and configuration space Probabilistic completeness Collision detection Probabilistic Roadmap (PRM) Rapidly-Exploring Random Trees (RRT) We are the Mobile Robotics Lab. (https://sites.skoltech.ru/mobilerobot...) at Skoltech (https://www.skoltech.ru/en) Course material at: https://github.com/MobileRoboticsSkol...
Comments






![3. CS50 на русском: Лекция #3 [Гарвард, Основы программирования, осень 2015 год]](https://imager.clipsaver.ru/agdXnmEadCM/max.jpg)