PID Control Overview скачать в хорошем качестве
PID Control Overview
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: PID Control Overview в качестве 4k
У нас вы можете посмотреть бесплатно PID Control Overview или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон PID Control Overview в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
PID Control Overview
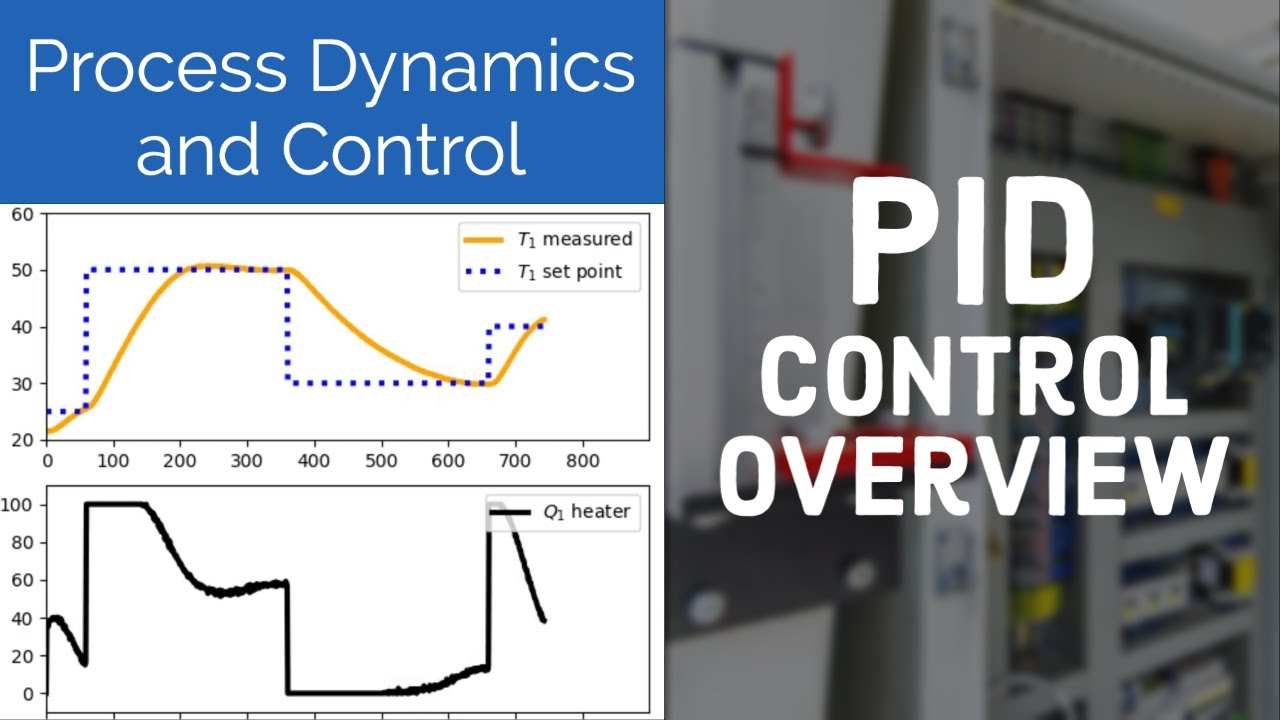
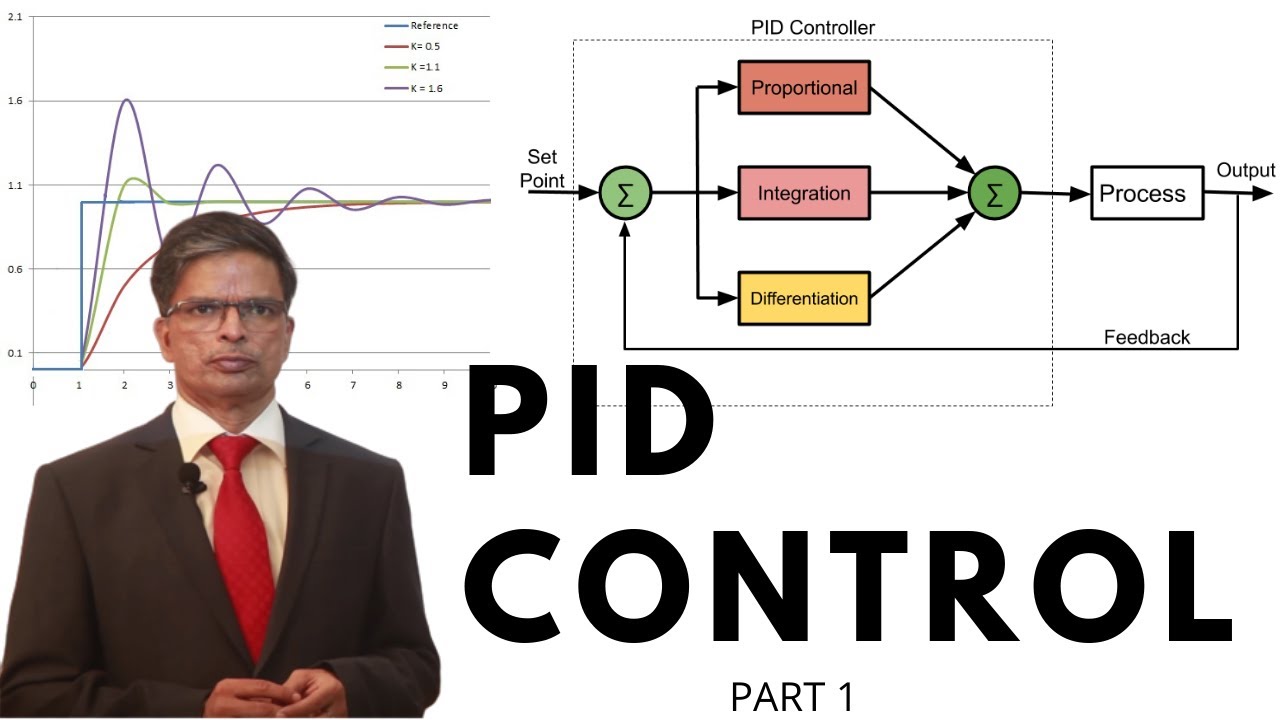
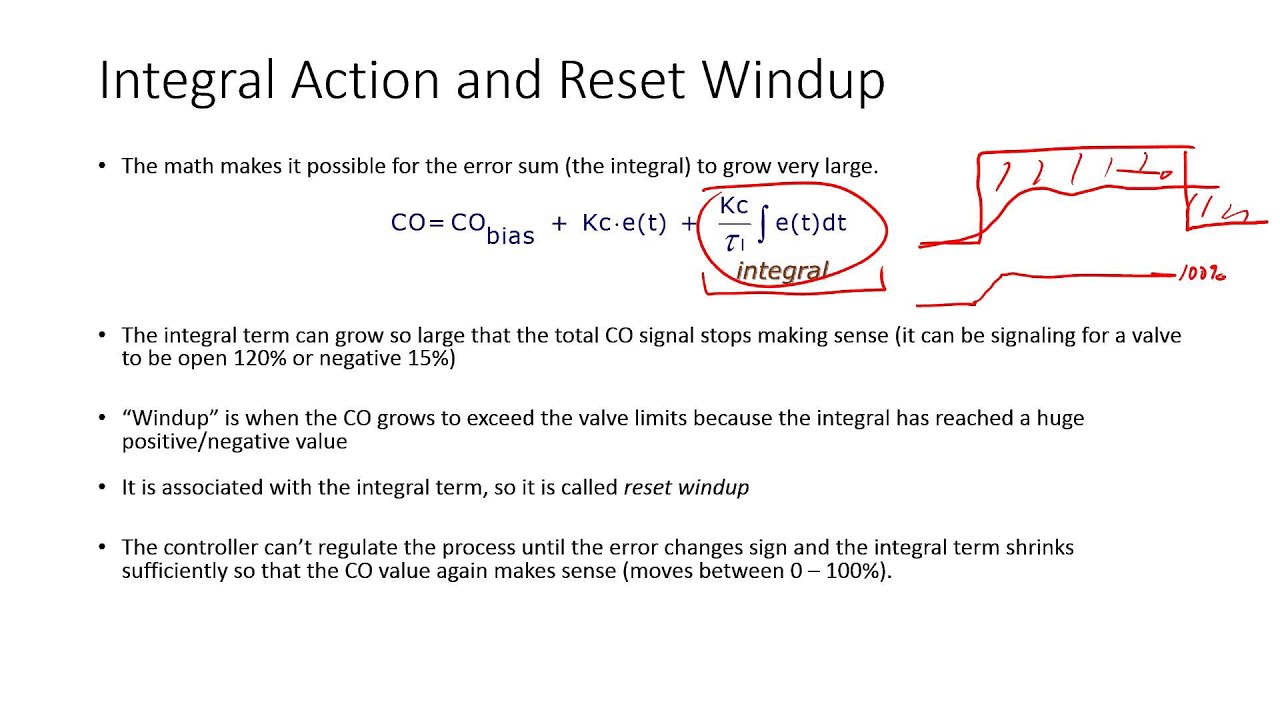
A PID (Proportional-Integral-Derivative) controller is a control loop feedback mechanism widely used in industrial control systems and other applications requiring continuously modulated control. It is a type of control system that uses feedback to continuously adjust the output of a process or system to match a desired setpoint. PID controllers are widely used in a variety of applications, including temperature control, flow control, and motor control, due to the PID ability to provide stable and accurate control with relatively simple implementation. A PID (Proportional Integral Derivative) controller consists of three components that are adjusted based on the difference between a set point (SP) and a measured process variable (PV). The output of a PID controller (u(t)) is calculated using the sum of the Proportional, Integral, and Derivative terms where KP, KI, and KD are constants that can be adjusted to fine-tune the performance of the controller. Proportional (P) control: This component adjusts the output of the process based on the current error between the setpoint and the process variable (PV). The larger the error, the larger the correction applied. Integral (I) control: This component adjusts the output based on the accumulated error over time. It helps eliminate steady-state error and can improve the stability of the control system. Derivative (D) control: This component adjusts the output based on the rate of change of the error. It helps to dampen oscillations and improve the stability of the control system but is often omitted because PI control is sufficient. The derivative term can amplify measurement noise (random fluctuations) and cause excessive output changes. Filters are important to get a better estimate of the process variable rate of change. The derivative of the error is substituted with the derivative of the Process Variable (PV) to avoid derivative kick when there is a setpoint change. The value of the controller output is transferred as the system input. The KP, KI, and KD parameters can also be written in terms of controller gain, integral reset time, and derivative time constant. See https://apmonitor.com/pdc/index.php/M... for additional course material.
Comments
-
 2 года назад
2 года назад
-
 Трансляция закончилась 12 дней назад
Трансляция закончилась 12 дней назад
-
 1 день назад
1 день назад
-
 5 лет назад
5 лет назад
-
 2 года назад
2 года назад
-
 7 дней назад
7 дней назад
-
 5 лет назад
5 лет назад
-
 1 год назад
1 год назад
-
 3 года назад
3 года назад
-
 2 месяца назад
2 месяца назад
-
 Трансляция закончилась 5 лет назад
Трансляция закончилась 5 лет назад
-
 1 день назад
1 день назад
-
 2 года назад
2 года назад
-
 5 месяцев назад
5 месяцев назад
-
 11 лет назад
11 лет назад
-
 12 лет назад
12 лет назад
-
 13 лет назад
13 лет назад
-
 8 лет назад
8 лет назад
-
 2 года назад
2 года назад
-
 7 дней назад
7 дней назад