Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing скачать в хорошем качестве
Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing
13 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing в качестве 4k
У нас вы можете посмотреть бесплатно Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Strategizing at Speed: A Learned Model Predictive Game for Multi-Agent Drone Racing
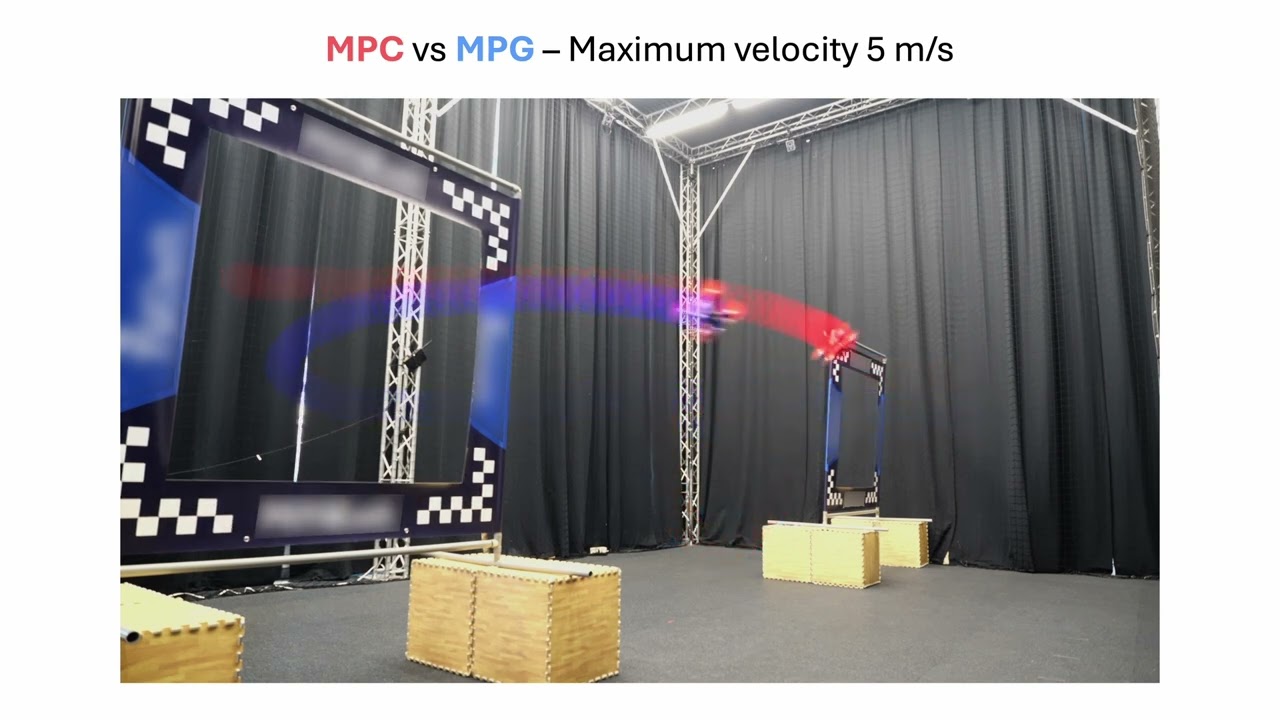
Autonomous drone racing pushes the bound- aries of high-speed motion planning and multi-agent strategic decision-making. Success in this domain requires drones not only to navigate at their limits but also to anticipate and counteract competitors’ actions. In this paper, we study a fundamental question that arises in this domain: how deeply should an agent strategize before taking an action? To this end, we compare two planning paradigms: the Model Predictive Game (MPG), which finds interaction-aware strategies at the expense of longer computation times, and contouring Model Predictive Control (MPC), which computes strategies rapidly but does not reason about interactions. We perform extensive experiments to study this trade-off, revealing that MPG out- performs MPC at moderate velocities but loses its advantage at higher speeds due to latency. To address this shortcoming, we propose a Learned Model Predictive Game (LMPG) approach that amortizes model predictive gameplay to reduce latency. In both simulation and hardware experiments, we benchmark our approach against MPG and MPC in head-to-head races, finding that LMPG outperforms both baselines.
Comments