Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation скачать в хорошем качестве
Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation
5 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation в качестве 4k
У нас вы можете посмотреть бесплатно Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
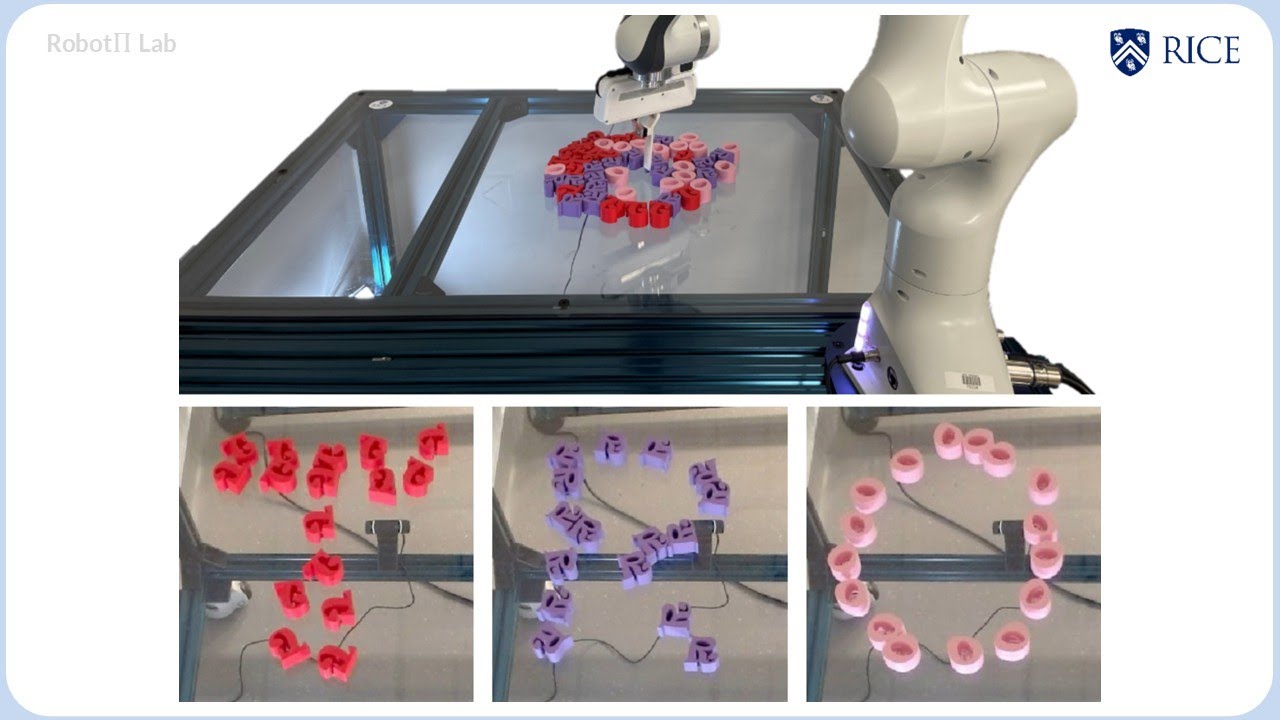
Object-Centric Kinodynamic Planning for Nonprehensile Robot Rearrangement Manipulation
Kejia Ren, Gaotian Wang, Andrew S. Morgan, Lydia E. Kavraki, and Kaiyu Hang Paper available at: https://ieeexplore.ieee.org/document/... (arXiv: https://arxiv.org/abs/2410.00261)
Comments












![Best of Deep House [2026] | Melodic House & Progressive Flow](https://imager.clipsaver.ru/Il-ZpBuC8tA/max.jpg)