Arduino 5 DOF Robotic Arm Field-Scanning Pick and Place скачать в хорошем качестве
Arduino 5 DOF Robotic Arm Field-Scanning Pick and Place
9 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Arduino 5 DOF Robotic Arm Field-Scanning Pick and Place в качестве 4k
У нас вы можете посмотреть бесплатно Arduino 5 DOF Robotic Arm Field-Scanning Pick and Place или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Arduino 5 DOF Robotic Arm Field-Scanning Pick and Place в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
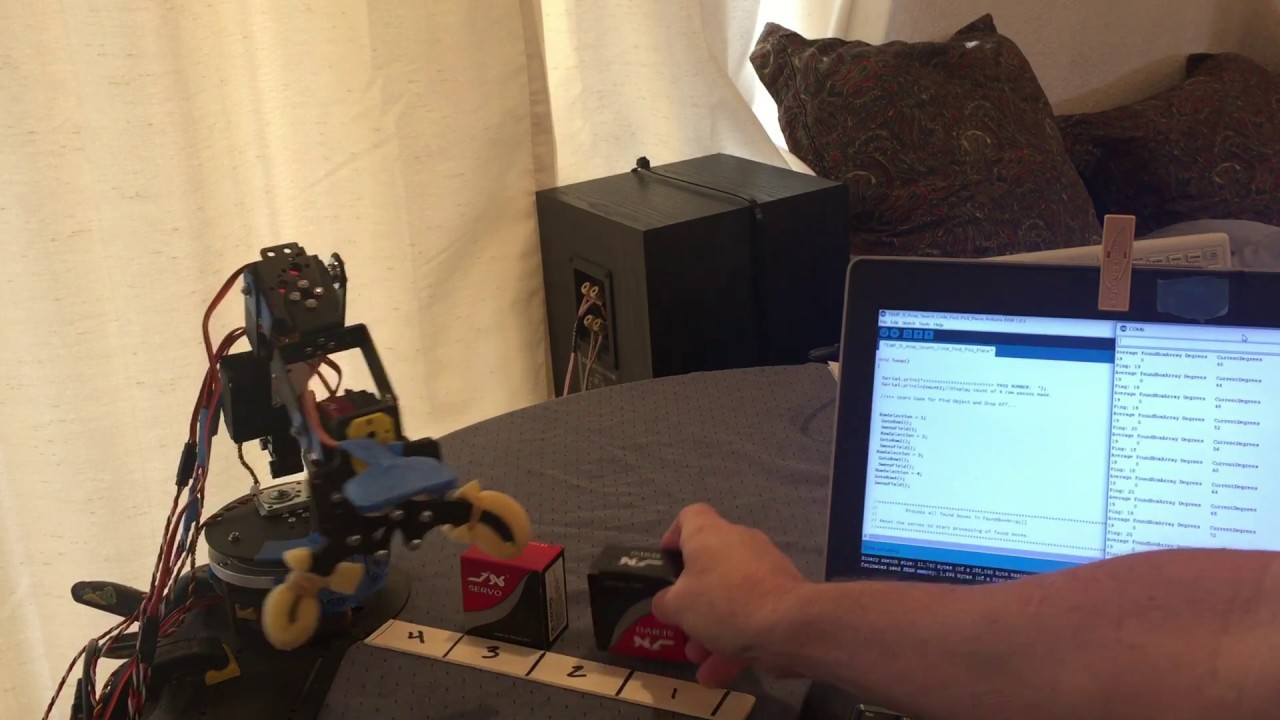
Arduino 5 DOF Robotic Arm Field-Scanning Pick and Place
This video explains how to design a 5 degree of freedom (DOF) Robotic Arm using and Arduino Mega to sweep a field consisiting of 4 rows by 160 degrees, scan for an object (a box), memorize its location, return to pick it up and move it to row 1. An ultra sonic sensor pings the field and when it detects a shorter ping that is approximately 15%-25% shorter than the rows average ping, it stores the location in the Found Box Array. Error correction and detection ignores rows greater than 4, ping values greater than 1.5 times the row average, and pinging the same box multiple times even as the concenteric rows get smaller towards the base. Care is taken to pick up each box without disturbing neighboring boxes and to firmly grip the selected box in order to move it to row 1. Also, discussed are servo selection, operation, maintenance/repair and torque requirements/specifications. Two different types of power supplies are used, one a breadboard module and the other a benchtop power supply. Two broken servos are taken apart and one is rebuilt to be fully functional. Lastly, the sketch is explained line by line describing in detail how the Robotic Arm will function. Coding for future projects involving an electromagnet are also included. I hope this video is informative and helps you with your project. Please share, like, use the sketch code, and subscribe. Thx, Scott Note: I will try to upload the sketch to www.codebender.com but I will also send a duplicate to www.mediafire.com. The code can be downloaded here... https://www.mediafire.com/?e4gfan7nmn... The file name is: TEMP_5I_Array_Search_Code_Find_Pick_Place.ino
Comments