10 code Action Recognition via Video Swin Transformer Pipeline скачать в хорошем качестве
10 code Action Recognition via Video Swin Transformer Pipeline
2 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 10 code Action Recognition via Video Swin Transformer Pipeline в качестве 4k
У нас вы можете посмотреть бесплатно 10 code Action Recognition via Video Swin Transformer Pipeline или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 10 code Action Recognition via Video Swin Transformer Pipeline в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
10 code Action Recognition via Video Swin Transformer Pipeline
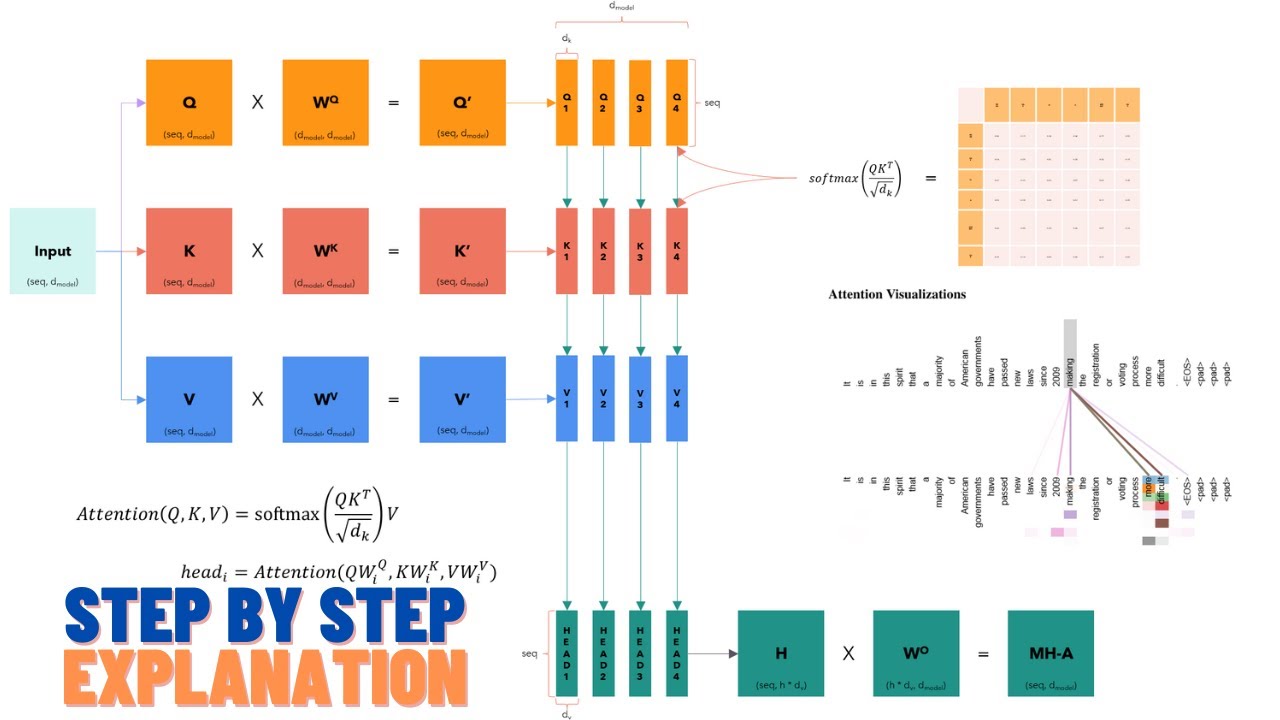
This code implements a video classification pipeline using the Video Swin Transformer, a state-of-the-art architecture for human action recognition. 1. Dataset Setup and Pre-processing The code prepares the Kinetics6-mini dataset for training and evaluation. decord.VideoReader: This library is used for high-performance video loading and frame extraction. np.linspace: To ensure every video has exactly 32 frames (the input size required by the network), this function generates equally spaced frame indexes. If a video is shorter than 32 frames, it effectively repeats frames to fill the gap. format_frames: Converts raw video frames into a format compatible with TensorFlow tensors. 2. Video Swin Transformer Architecture The model uses a hierarchical vision transformer specifically designed for video data. Feature Extractor: It leverages a pre-trained Video Swin Transformer backbone, which uses "shifted windows" to capture both spatial information (within a frame) and temporal information (across frames). Pre-trained Weights: The code downloads and loads videoswin_base_kinetics400_classifier.weights.h5, allowing the model to benefit from patterns learned on the massive Kinetics-400 dataset. 3. Data Generators (prepare_dataset) This function manages how data is fed into the model during training. Input Parameters: data: A list containing tuples of video file paths and their corresponding integer class labels. batch_size: Set to 4, defining how many videos are processed at once. frame_count: Fixed at 32, which is the temporal depth the model expects. 4. Execution and Performance Hardware: The script is designed to run on a T4 GPU in Google Colab to handle the heavy computational load of 3D transformers. Accuracy: For the Kinetics6-mini dataset, this implementation typically achieves a test accuracy between 80% and 100%.
Comments










![Почему взрываются батарейки и аккумуляторы? [Veritasium]](https://imager.clipsaver.ru/a3-3R9zwyGY/max.jpg)