Surgical Robot Challenge 2025: Finalist скачать в хорошем качестве
Surgical Robot Challenge 2025: Finalist
1 месяц назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Surgical Robot Challenge 2025: Finalist в качестве 4k
У нас вы можете посмотреть бесплатно Surgical Robot Challenge 2025: Finalist или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Surgical Robot Challenge 2025: Finalist в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Surgical Robot Challenge 2025: Finalist
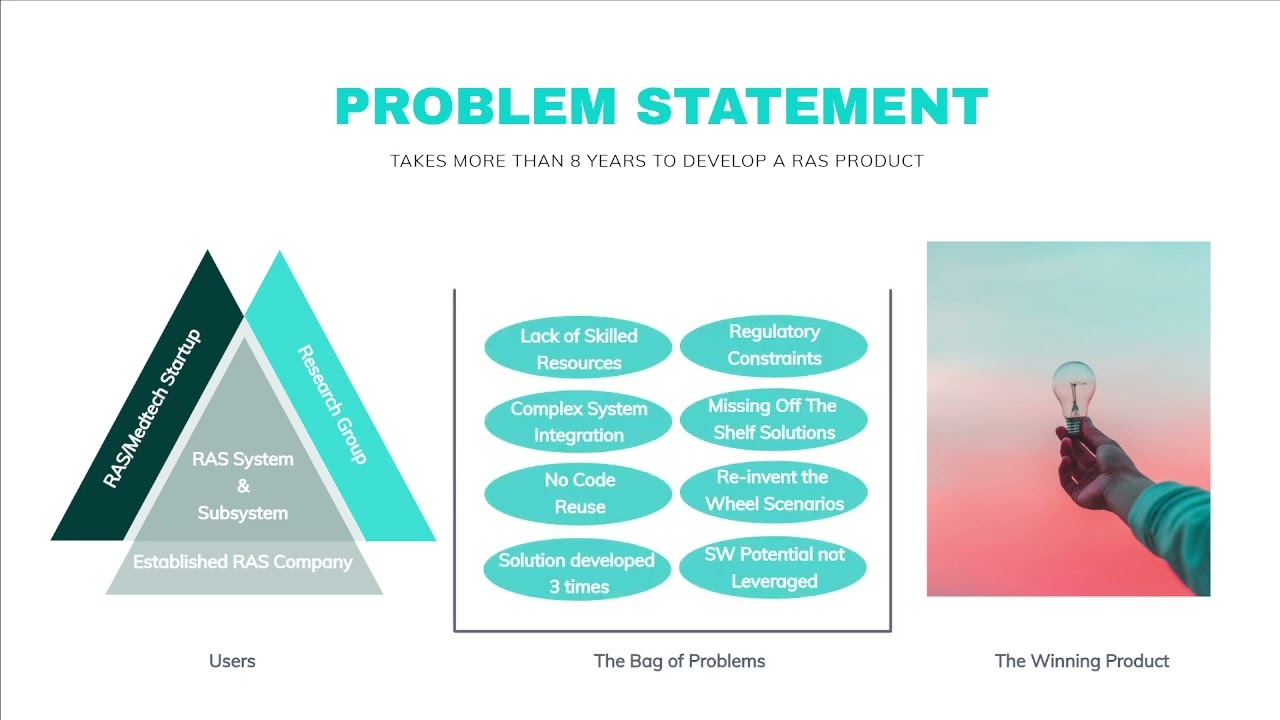
Sim-2-Real Transfer for Intelligent Robotic System for Autonomous Placenta Mapping for TTTS surgery In this project, we developed an autonomous robotic system using robotic arm to map the placenta, helping surgeon during TTTS surgery. The solution was developed in simulations: a physics-based Mujoco simulation to validate robot motion and a Gymnasium-based environment for reinforcement learning agent training. After successful simulation testing, we conducted sim-to-real transfer, deploying our trained system on a real robotic arm. Our approach has the potential to enhance fetal surgery by automating critical aspect of the procedure, reducing surgeon cognitive load. The system could be further developed to maked advanced robotic-assisted surgery more accessible worldwide. Team: Jakub Krupiński, Przemysław Korzeniowski, SANO Centre for Computational Medicine
Comments