Semantic Scene Completion on SemanticKITTI скачать в хорошем качестве
Semantic Scene Completion on SemanticKITTI
6 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Semantic Scene Completion on SemanticKITTI в качестве 4k
У нас вы можете посмотреть бесплатно Semantic Scene Completion on SemanticKITTI или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Semantic Scene Completion on SemanticKITTI в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
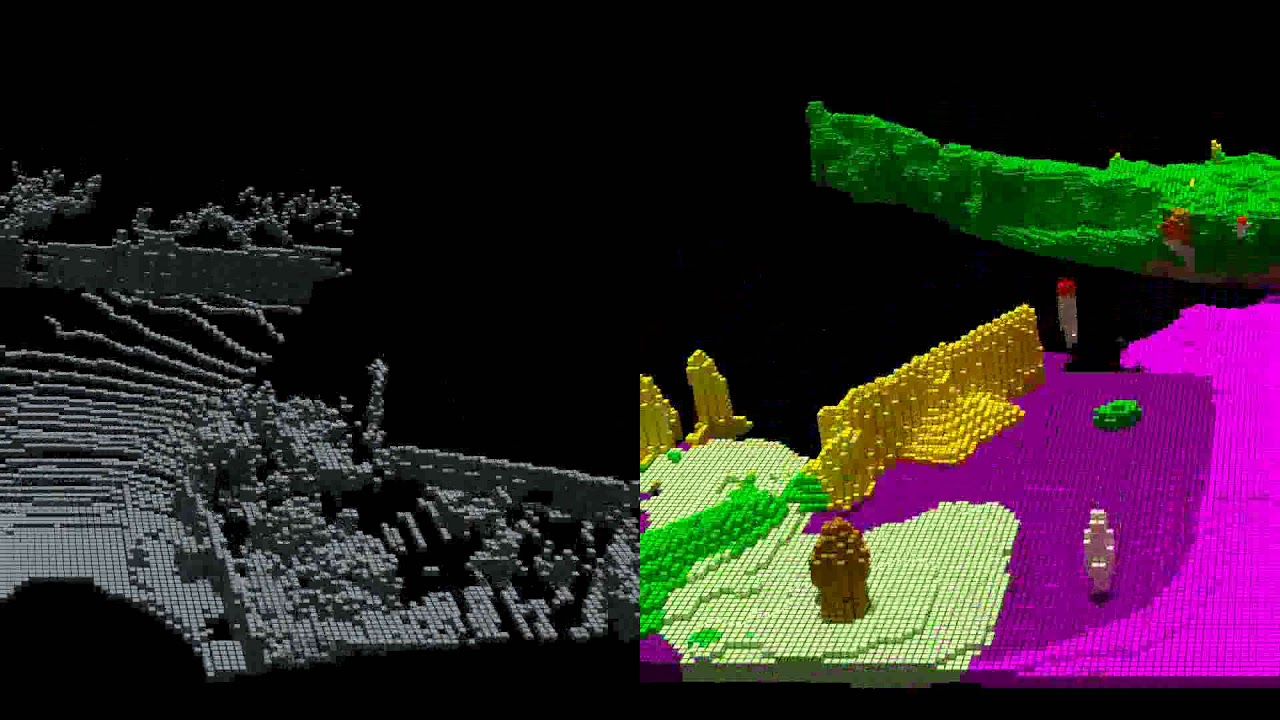
Semantic Scene Completion on SemanticKITTI
This video features a side-by-side comparison of input from LIDAR devices and the outputs from my 3D semantic scene completion algorithm. On the left, view the raw laser scans as input data; on the right, see the algorithm's output — a fully realized 3D scene with filled gaps and semantic labels. We developed the largest freely accessible dataset for this purpose, pivotal in autonomous driving technology. This dataset has garnered over 1,900 citations (as of September 2024) and was highlighted at ICCV 2019. Download the dataset at http://semantic-kitti.org/dataset.htm... Tools to visualize the voxel data can be found here: https://github.com/PRBonn/semantic-ki...
Comments