Mathias Gehrig on Event Cameras and How to Make Them Useful | Toronto AIR Seminar скачать в хорошем качестве
Mathias Gehrig on Event Cameras and How to Make Them Useful | Toronto AIR Seminar
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Mathias Gehrig on Event Cameras and How to Make Them Useful | Toronto AIR Seminar в качестве 4k
У нас вы можете посмотреть бесплатно Mathias Gehrig on Event Cameras and How to Make Them Useful | Toronto AIR Seminar или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Mathias Gehrig on Event Cameras and How to Make Them Useful | Toronto AIR Seminar в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Mathias Gehrig on Event Cameras and How to Make Them Useful | Toronto AIR Seminar
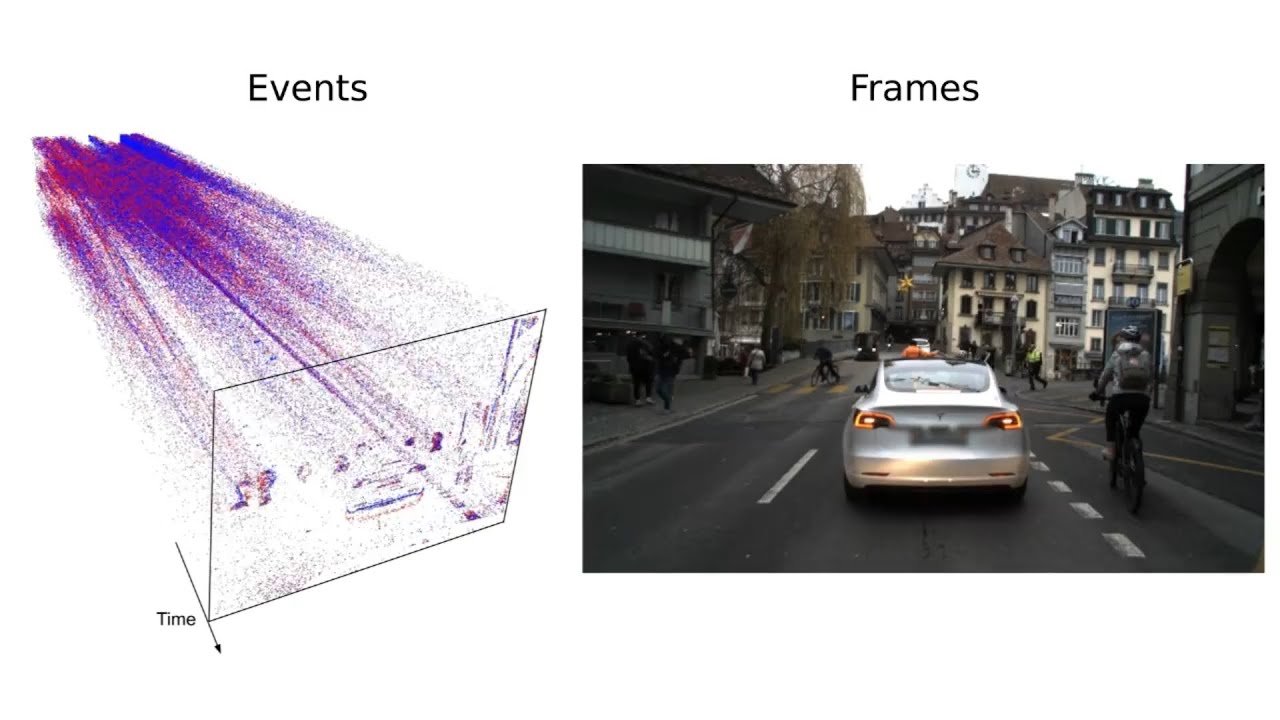
Abstract: Computer Vision has been dominated by frame-based data acquisition and processing since its inception. In the last few years, we have explored event cameras that offer a different perspective. Instead of capturing frames at regular time intervals, event cameras measure per-pixel changes in intensity at the time they occur. As a result of this working principle, event cameras can capture high-speed phenomena at very low latency and energy consumption. In this talk, I will discuss the motivation for using event cameras and share insights into our success stories. At the same time, this talk also highlights difficulties we have encountered in developing new algorithms, open research directions, and what might be missing for achieving widespread adoption. Paper: Gehrig, Mathias, et al. "E-raft: Dense optical flow from event cameras." 3DV. 2021. https://ieeexplore.ieee.org/abstract/... Gehrig, Mathias, et al. "Dsec: A stereo event camera dataset for driving scenarios." RA-L. 2021. https://ieeexplore.ieee.org/abstract/... Gehrig, Mathias, Manasi Muglikar, and Davide Scaramuzza. "Dense Continuous-Time Optical Flow from Events and Frames." arXiv preprint arXiv:2203.13674 (2022). https://arxiv.org/abs/2203.13674 Bio: Mathias Gehrig is a final year Ph.D. student at the Robotics and Perception Lab at the University of Zurich in Switzerland. Previously, he studied "Robotics, Systems, and Control" after finishing his Bachelor's Degree in Mechanical Engineering at ETH Zurich. He also worked for one year as a research engineer at the Autonomous Systems Lab with Roland Siegwart before starting his Ph.D. His research is broadly concerned with motion estimation from event cameras and finding new ways to combine event-based and frame-based paradigms. Besides his research on event cameras, Mathias has also participated in autonomous drone racing competitions, where the team won the IROS 2018 racing event and achieved 2nd place at the AlphaPilot Challenge in 2019. Toronto AIR Seminar: The Toronto AI Robotics Seminar Series is a set of events featuring young robotics and AI experts. The talks are given by local as well as global speakers and organized by the Faculty and Students at University of Toronto’s Department of Computer Science. We welcome students, researchers and robotics enthusiasts from around the world to join us and interact with the Toronto Robotics Community. Find out more at: https://robotics.cs.toronto.edu/toron...
Comments