Advanced Chassis Control : Achieve Comprehensive Multi-DOF Decoupling Using In-Wheel Motor(Part2) скачать в хорошем качестве
Advanced Chassis Control : Achieve Comprehensive Multi-DOF Decoupling Using In-Wheel Motor(Part2)
3 дня назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Advanced Chassis Control : Achieve Comprehensive Multi-DOF Decoupling Using In-Wheel Motor(Part2) в качестве 4k
У нас вы можете посмотреть бесплатно Advanced Chassis Control : Achieve Comprehensive Multi-DOF Decoupling Using In-Wheel Motor(Part2) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Advanced Chassis Control : Achieve Comprehensive Multi-DOF Decoupling Using In-Wheel Motor(Part2) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Advanced Chassis Control : Achieve Comprehensive Multi-DOF Decoupling Using In-Wheel Motor(Part2)
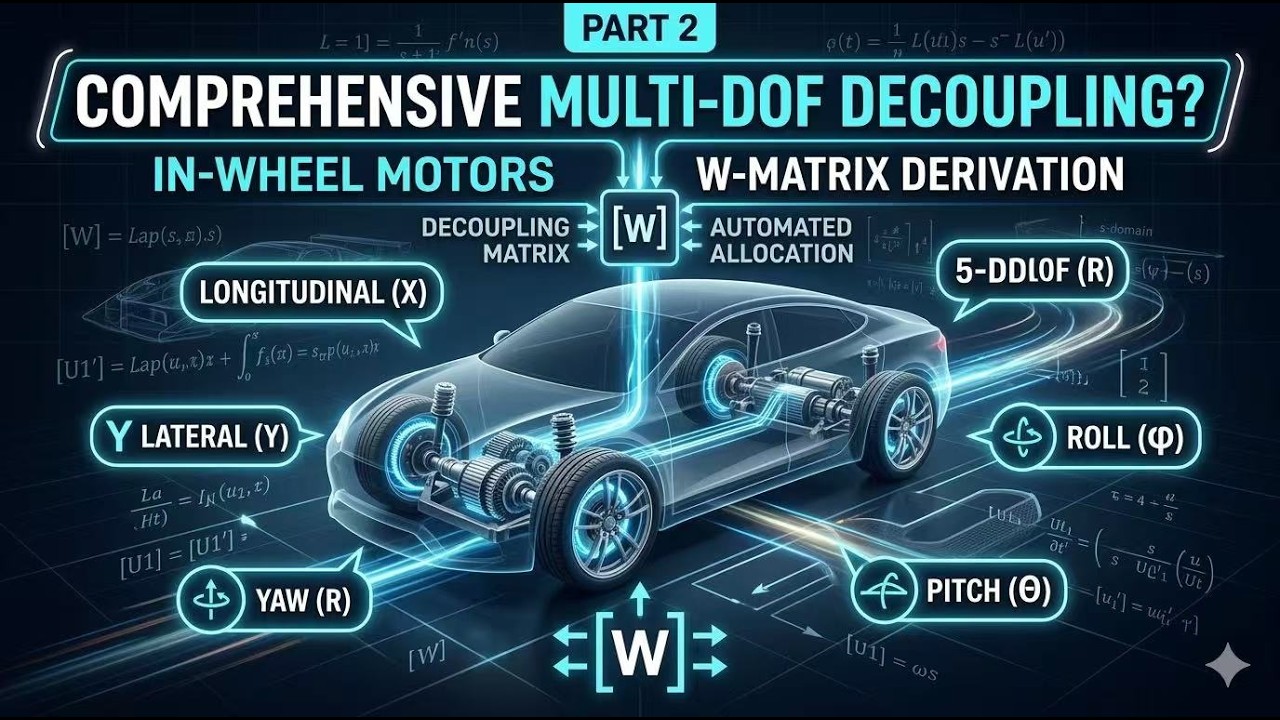
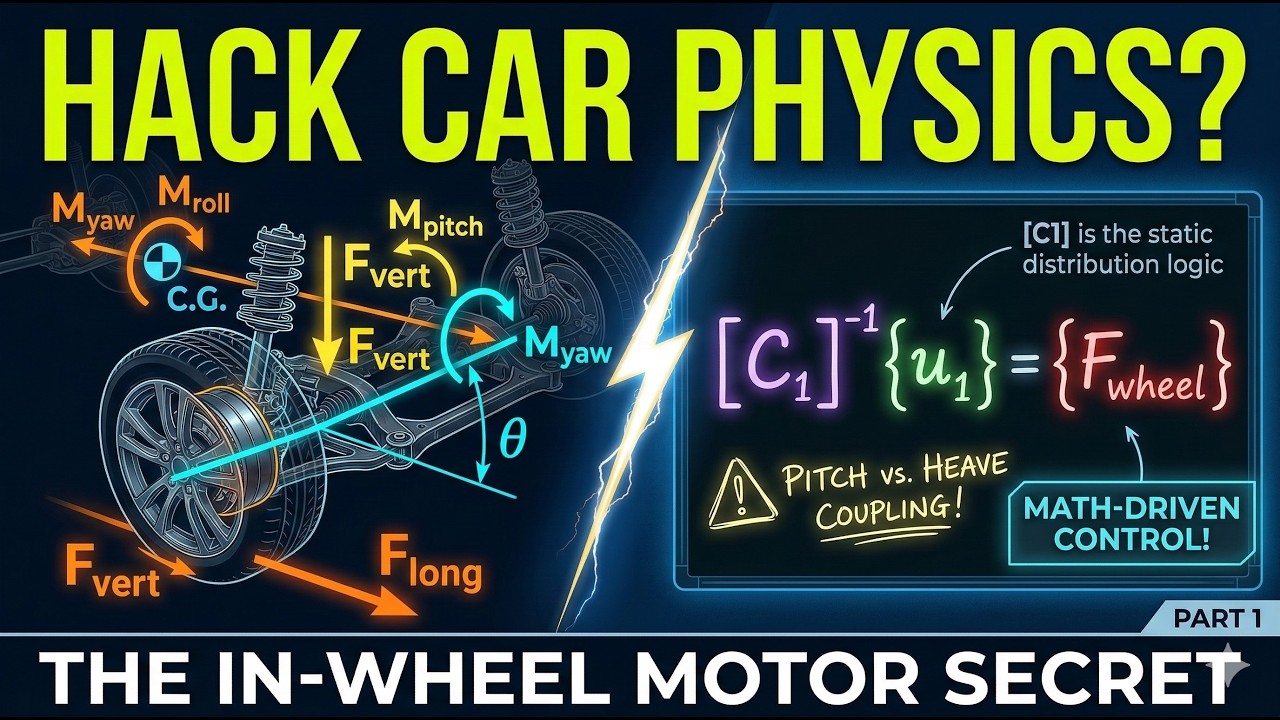
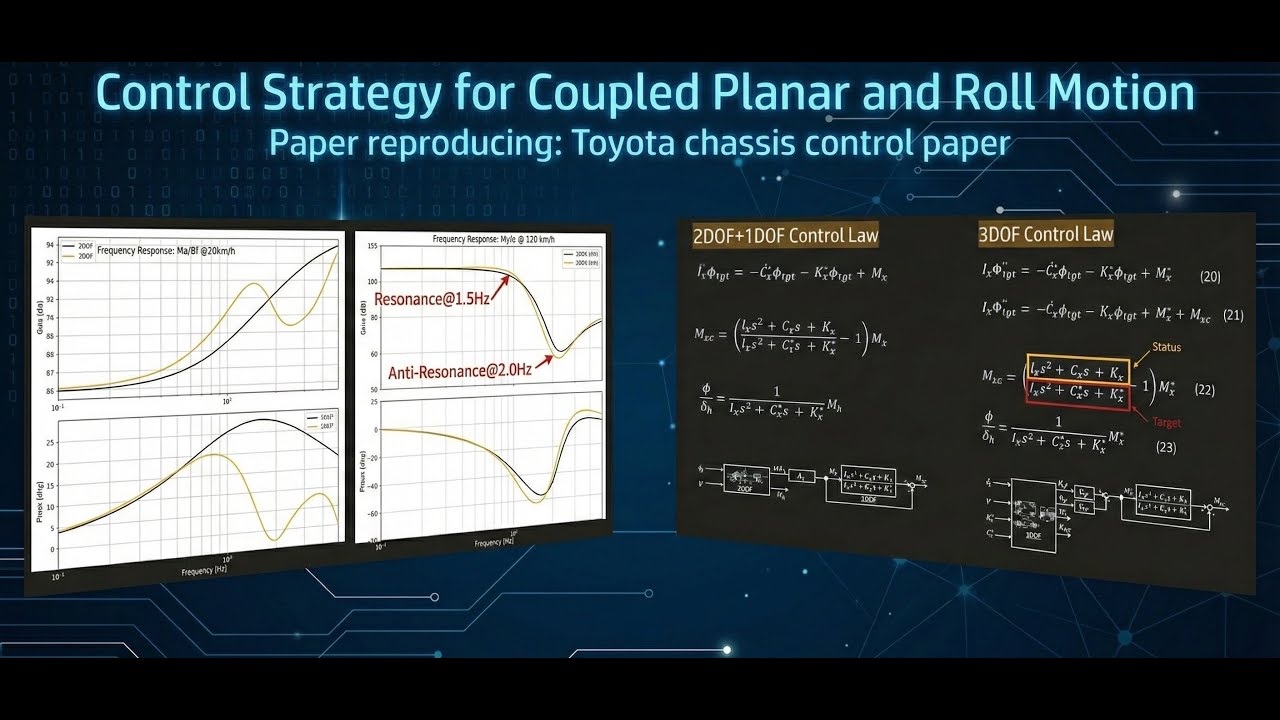
In our previous video (Part 1), we tackled the paper and successfully established the 5-DOF (Degree of Freedom) kinematic and dynamic models of the vehicle. If you haven't watched it yet, I highly recommend checking it out first, as it lays the groundwork for today's content! In this episode, we'll dive deeper to hardcore analyze the core content of this paper: the Comprehensive Decoupling Control Strategy for Multiple Degrees of Freedom. We will reveal how to utilize the independent control capabilities of in-wheel motors to resolve the strong coupling relationships between various vehicle motion states. 📌 Key Highlights in This Episode (Based on Chapter 3): 5-DOF Equations Upgrade (00:22 - 04:15): A detailed derivation of the dynamic equations for Longitudinal, Lateral, Yaw, Roll, and Pitch motions, fully substituting the control forces and control moments of each dimension into the equations. Coupling Effect Analysis (04:16 - 05:38): Using Laplace Transforms to extract transfer functions, intuitively analyzing the system's inherent characteristics and how each motion dimension (especially Yaw, Roll, and Pitch) influences one another. Core Decoupling Strategy (05:39 - 06:27): The brilliant approach proposed by the author—forcing the elimination of specific coupling terms and introducing new decoupled control moments (Mz', Mx') to prevent interference between motions. Control Matrix Derivation (06:28 - 07:30): Step-by-step derivation and calculation of the final control input matrices (U1 and U1') and the crucial decoupling matrix (W matrix), enabling automated, decoupled allocation of control commands. 💡 Series Learning Objectives: Through the derivations in Part 1 and Part 2, we need to master two core engineering concepts: Hardware Foundation: How in-wheel motors provide the foundation for independent control over a vehicle's 5 degrees of freedom. Software Algorithm: How to use the decoupling strategy (the W matrix) at the control level so these 5 DOFs operate independently without interference, thereby achieving superior chassis dynamic response. 🔗 Part 1 Video Link: [ • Toyota's Masterpiece: Decoupled 3D Moment ... ] 📄 Reference Paper: Control Strategy for Coupled Planar and Roll Motion (Reproducing the Toyota chassis control paper) 👇 Join the Discussion: The derivation process gets a bit hardcore today! If you have any questions about the formulas or the logic, feel free to drop a comment below—let's discuss! If you found this "paper reading" video helpful for your studies or research, please make sure to Like, Share, and Subscribe to our channel. Your support is my biggest motivation to keep producing hardcore educational content!
Comments














![Как измеряют самые слабые силы во Вселенной? [Veritasium]](https://imager.clipsaver.ru/6lK2JVwajTw/max.jpg)

