Robot Arm joystick controlled sinhala скачать в хорошем качестве
Robot Arm joystick controlled sinhala
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Robot Arm joystick controlled sinhala в качестве 4k
У нас вы можете посмотреть бесплатно Robot Arm joystick controlled sinhala или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Robot Arm joystick controlled sinhala в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Robot Arm joystick controlled sinhala
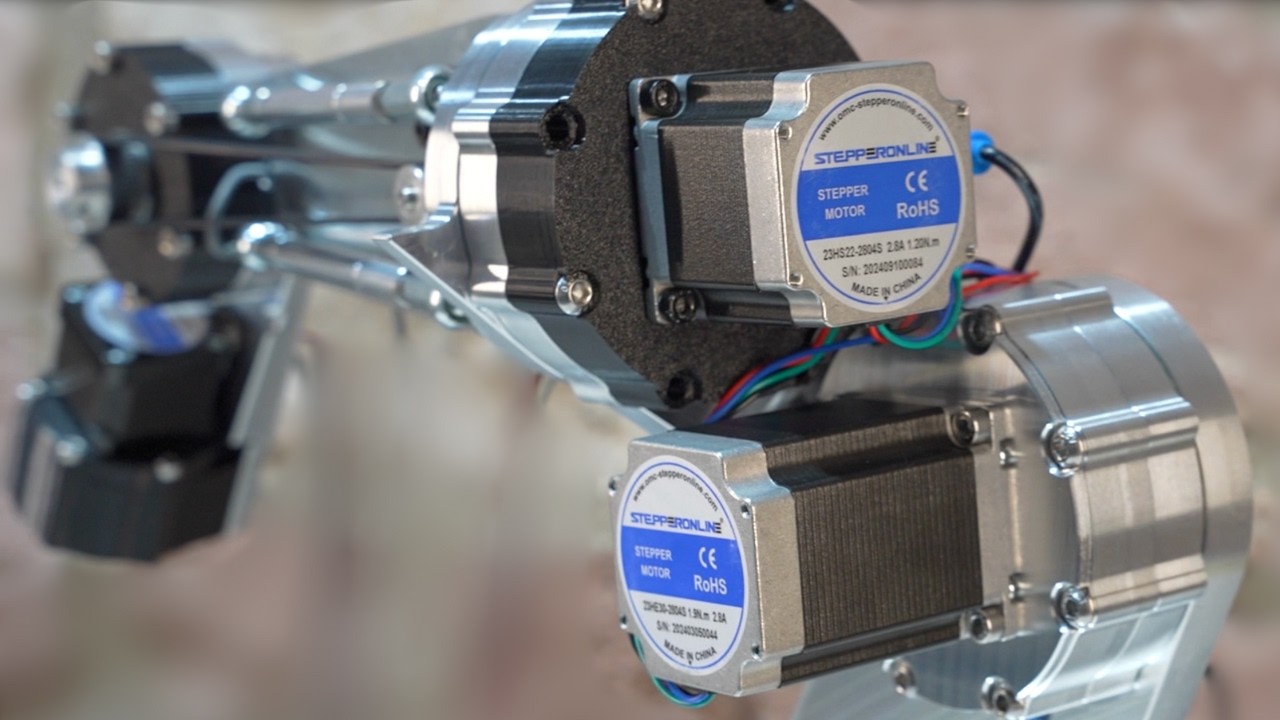
This video describe about 5 DOF(Degrees of freedom) servo robot arm.Here robot circuit and program is explained.Robot arm program is given bellow. servo variable speed library: https://github.com/netlabtoolkit/VarS... music:https://www.bensound.com/ Robot arm program***************** #include VarSpeedServo.h VarSpeedServo servo1; VarSpeedServo servo2; VarSpeedServo servo3; VarSpeedServo servo4; VarSpeedServo servo5; int joyX = A0; int joyY = A1; int joyX1 = A2; int joyY1 = A3; int btn=2; int servoVal; void setup() { servo1.attach(9); servo2.attach(8); servo3.attach(7); servo4.attach(6); servo5.attach(5); pinMode(btn,INPUT); } void loop() { servoVal = analogRead(joyX); servoVal = map(servoVal, 0, 1023, 0, 180); servo1.write(servoVal,70,true); servoVal = analogRead(joyY); servoVal = map(servoVal, 0, 1023, 70, 180); servo2.write(servoVal,70,true); servoVal = analogRead(joyX1); servoVal = map(servoVal, 0, 1023, 0, 180); servo3.write(servoVal,70,true); servoVal = analogRead(joyY1); servoVal = map(servoVal, 0, 1023, 0, 180); servo4.write(servoVal,70,true); delay(15); { if(digitalRead(btn)==HIGH){ servo5.write(50,70,true); }else{ servo5.write(0,70,true); } } delay(15); } In This code angle bracket is not insert in the herder("VarSpeedServo.h ") please add the angle brackets here..
Comments




![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)










![[026] - NE555 ගැන දන ගත යුතු කරුණු සියල්ල - All about NE555 in Sinhala](https://imager.clipsaver.ru/9JMXfoGl9m8/max.jpg)