J020: Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on RL скачать в хорошем качестве
J020: Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on RL
10 часов назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: J020: Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on RL в качестве 4k
У нас вы можете посмотреть бесплатно J020: Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on RL или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон J020: Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on RL в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
J020: Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on RL
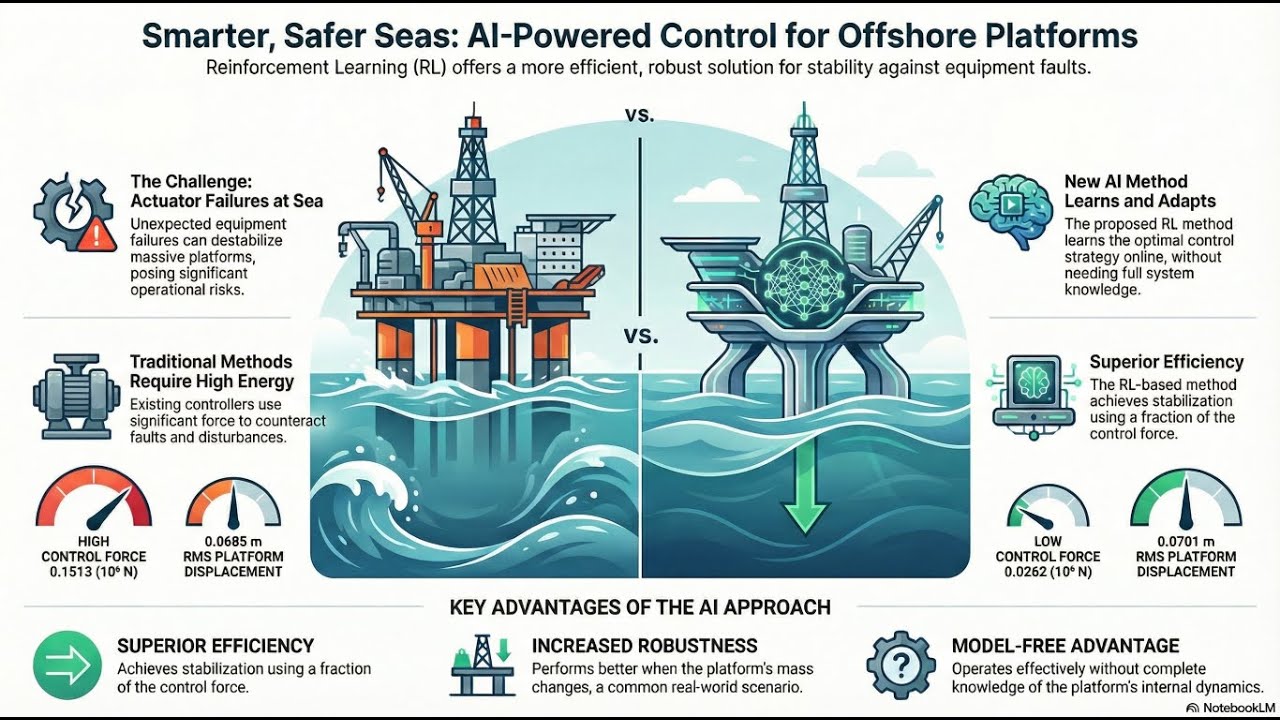
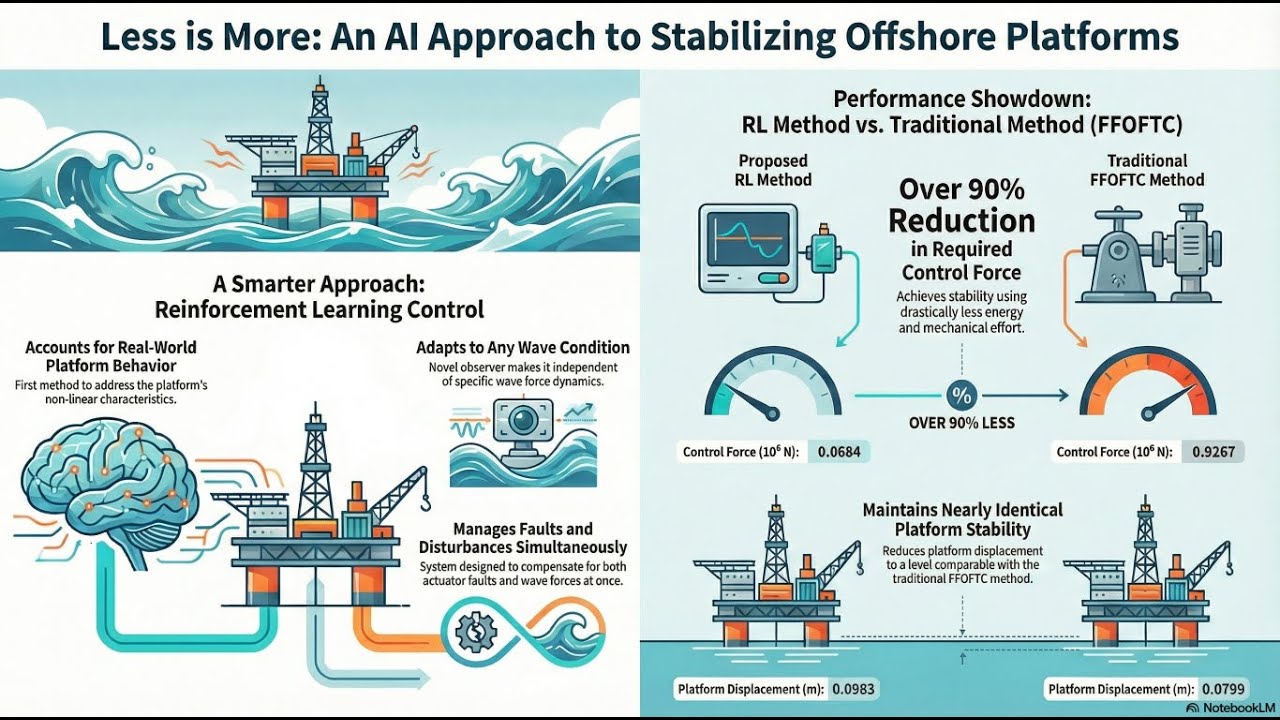
Ziaei A.*, Kharrati H.*, Rahimi A. (2022, Feb.) Fault-Tolerant Control for Nonlinear Offshore Steel Jacket Platforms Based on Reinforcement Learning, Ocean Engineering, from Elsevier BV, Volume 246, Issue N/A, pp. 110247, doi: 10.1016/j.oceaneng.2021.110247 The provided source describes a reinforcement learning-based fault-tolerant control method designed to stabilize nonlinear offshore steel-jacket platforms. By employing adaptive dynamic programming and online policy iteration, the system mitigates vibrations caused by irregular ocean waves and internal actuator malfunctions. A specialized nonlinear observer is integrated to estimate external disturbances and faults without requiring prior knowledge of wave dynamics. Mathematical proofs and simulations demonstrate that this approach achieves superior energy efficiency, requiring significantly less control force than traditional methods. Ultimately, the research ensures that platforms remain stable and uniformly ultimately bounded even under unpredictable environmental stress and mechanical failures.
Comments