AUTOSAR Testing with Reactis скачать в хорошем качестве
AUTOSAR Testing with Reactis
6 часов назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: AUTOSAR Testing with Reactis в качестве 4k
У нас вы можете посмотреть бесплатно AUTOSAR Testing with Reactis или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон AUTOSAR Testing with Reactis в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
AUTOSAR Testing with Reactis
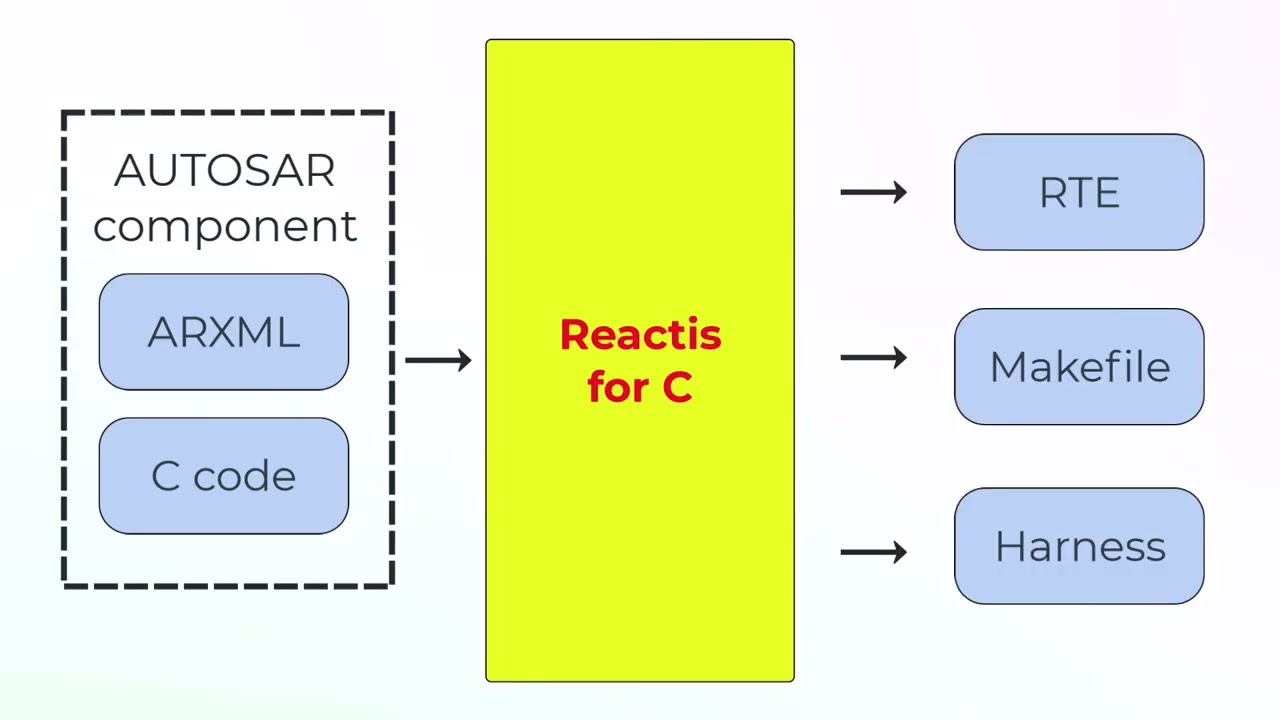
This video demonstrates how to test an AUTOSAR atomic software component end-to-end using Reactis for C, shown with an adaptive cruise control example. You’ll see the entire workflow: import ARXML, generate a minimal runtime environment (RTE), create C harnesses for runnables, generate comprehensive test suites, execute tests on C code; and (if using model-based design with Simulink) compare code with the originating Simulink model via back-to-back testing and lock-step debugging. Start by importing the component’s ARXML files through the Reactis for C AUTOSAR import tool. Reactis generates a minimal RTE, a Makefile, and C harness files that specify each runnable’s inputs, outputs, and configuration variables. The wizard proposes mappings between engineering objects and C sources, detects runnables, and compiles the generated RTE with the component code so the harness is ready to test. Open the harness editor to review inferred items: initialization and entry functions, sample period, inputs, outputs, and configuration variables. Set input ranges so test generation selects meaningful values. Configure error checks and coverage metrics, then generate a test suite. Reactis quickly produces compact suites that exercise coverage targets; run them in Simulator to produce detailed reports listing runtime errors, output differences, and when coverage targets were first exercised. For components modeled in Simulink, the video shows back-to-back testing: create matching model harnesses with the same sample periods and input ranges, re-import and match C harnesses to those model harnesses, then use the same test suite on both model and compiled code. Reactis compares actual C outputs against model-derived expected outputs and generates difference reports and plots when mismatches occur. When differences appear, connect Reactis-for-C and Reactis-for-Simulink for lock-step execution, click a model block to highlight the corresponding code, set synchronized breakpoints, and inspect signals and variables side-by-side while stepping. This makes root-cause analysis efficient when investigating differences or runtime errors. The workflow produces verifiable artifacts—RTE, Makefile, harness files, test suites (.rst), and HTML reports—that support integration, regression testing, and audit evidence. In short, this demo provides a repeatable process to import AUTOSAR components, auto-generate harnesses and runtime artifacts, create exhaustive test suites, and validate compiled code against the model with powerful reporting and lock-step diagnostics—accelerating testing, improving traceability, and simplifying debugging of model-to-code differences.
Comments