Third Round of Testing : Vision-Based Positioning for Autonomous Robots скачать в хорошем качестве
Third Round of Testing : Vision-Based Positioning for Autonomous Robots
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Third Round of Testing : Vision-Based Positioning for Autonomous Robots в качестве 4k
У нас вы можете посмотреть бесплатно Third Round of Testing : Vision-Based Positioning for Autonomous Robots или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Third Round of Testing : Vision-Based Positioning for Autonomous Robots в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
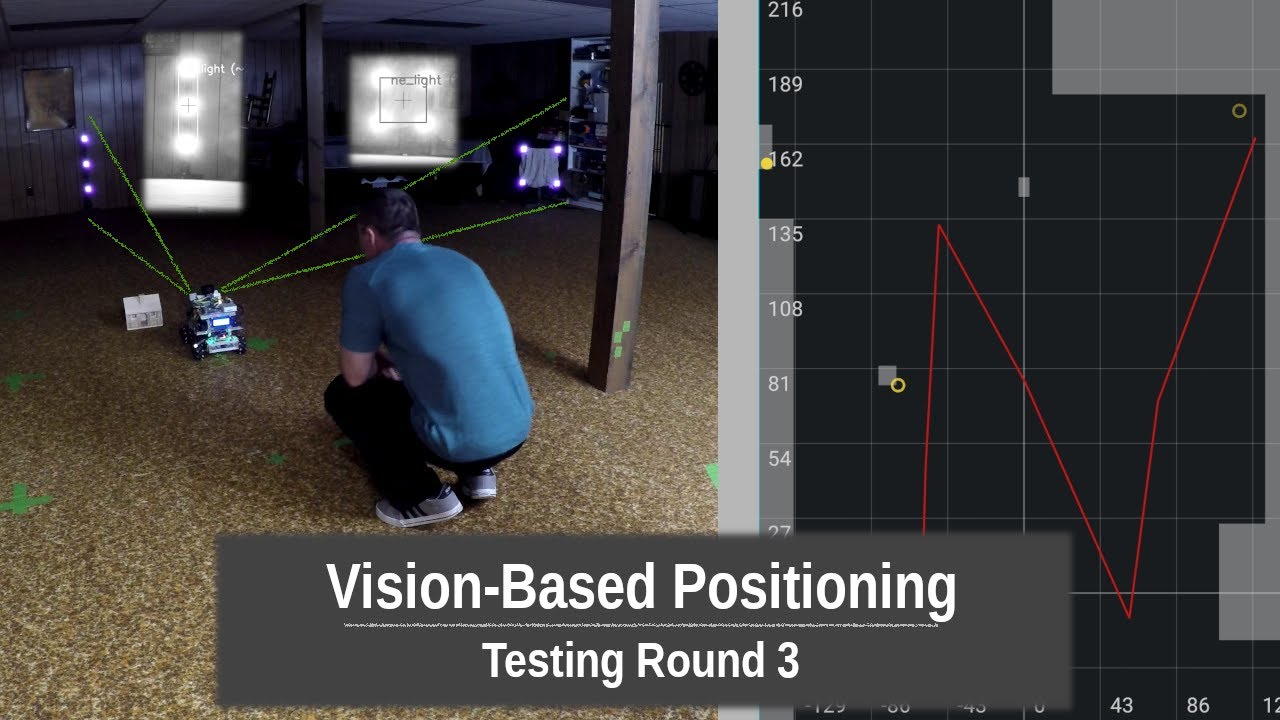
Third Round of Testing : Vision-Based Positioning for Autonomous Robots
I am building a positioning system for use in autonomous robots that uses only vision (or vision plus LIDAR) to determine heading and position. I am still testing the system, it is built using PI cameras (v2 or v3), Arduinos, RPLidar (optional), and an Nvidia Jetson Nano or Raspberry Pi (or anything that can receive live video feeds and run Tensorflow models). This is for fun and is also the capstone project for my master's degree. Ideally, I'll end up with a system that anyone can use with a couple of pi cameras to more easily solve problems with autonomous robots where tracking position and heading is important (and gps not available or not accurate enough). More about the project can be found on the wiki at: https://github.com/mattcalhoun1/LVPS/...
Comments

![Best of Deep House [2026] | Melodic House & Progressive Flow](https://imager.clipsaver.ru/Il-ZpBuC8tA/max.jpg)