New Bending Actuator for Soft Robots скачать в хорошем качестве
New Bending Actuator for Soft Robots
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: New Bending Actuator for Soft Robots в качестве 4k
У нас вы можете посмотреть бесплатно New Bending Actuator for Soft Robots или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон New Bending Actuator for Soft Robots в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
New Bending Actuator for Soft Robots
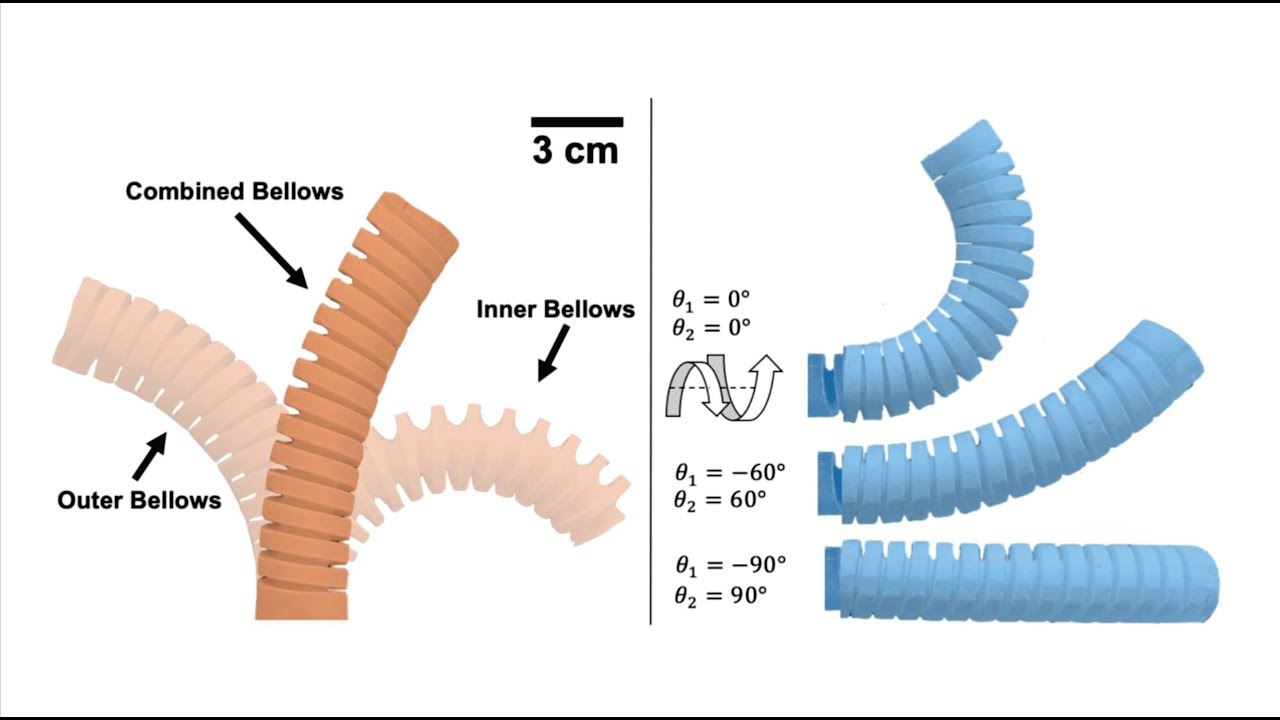
This is the video presentation for the paper below. We developed a new mechanical bending actuator for soft robots. The actuator is 3D printable from standard (non-soft) materials, and is based on concentric precurved bellows. J. A. Childs and C. Rucker, "Concentric Precurved Bellows: New Bending Actuators for Soft Robots," in IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1215-1222, April 2020, doi: 10.1109/LRA.2020.2967323. For related work, see our lab website: https://sites.google.com/view/reach-r...
Comments