Green-VLA: Поэтапные модели «зрение-язык-действие» для человекоподобных роботов-универсалов скачать в хорошем качестве
Green-VLA: Поэтапные модели «зрение-язык-действие» для человекоподобных роботов-универсалов
11 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Green-VLA: Поэтапные модели «зрение-язык-действие» для человекоподобных роботов-универсалов в качестве 4k
У нас вы можете посмотреть бесплатно Green-VLA: Поэтапные модели «зрение-язык-действие» для человекоподобных роботов-универсалов или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Green-VLA: Поэтапные модели «зрение-язык-действие» для человекоподобных роботов-универсалов в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Green-VLA: Поэтапные модели «зрение-язык-действие» для человекоподобных роботов-универсалов
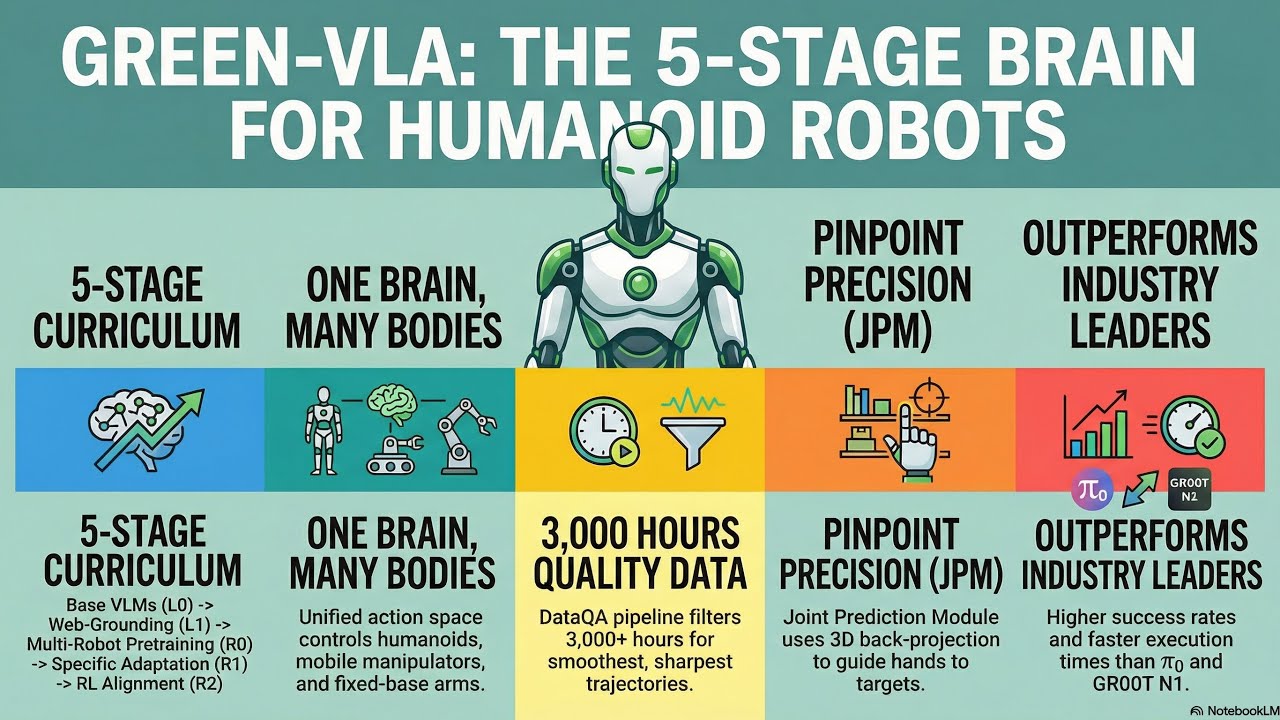
Представляем модель Green-VLA и связанные с ней обучающие фреймворки для улучшения возможностей управления обеими руками двуногих роботов. Для повышения эффективности использования данных исследователи значительно расширили обучающие данные, перевернув и зеркально отобразив существующие записи, и создали модуль планирования работы, который разлагает сложные голосовые команды на детальные задачи с использованием GigaVision VLM. В частности, были введены новые функции потерь и технологии модуляции, зависящие от скорости, для решения проблем снижения производительности, возникающих при обучении различным данным робота с разными пространствами управления. Кроме того, улучшенная тонкая настройка на основе обучения с подкреплением (RL) повысила точность поведения и продемонстрировала стабильную классификацию объектов и манипулирование ими как в симуляционной, так и в реальной среде. В результате система поддерживает различные типы роботов, позволяя гибко выполнять задачи — от точного локального управления до долговременного выполнения. https://arxiv.org/pdf/2602.00919
Comments