Pixhawk Collision Prevention in PX4 SETUP with a Rangefinder, just a few params! скачать в хорошем качестве
Pixhawk Collision Prevention in PX4 SETUP with a Rangefinder, just a few params!
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Pixhawk Collision Prevention in PX4 SETUP with a Rangefinder, just a few params! в качестве 4k
У нас вы можете посмотреть бесплатно Pixhawk Collision Prevention in PX4 SETUP with a Rangefinder, just a few params! или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Pixhawk Collision Prevention in PX4 SETUP with a Rangefinder, just a few params! в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Pixhawk Collision Prevention in PX4 SETUP with a Rangefinder, just a few params!
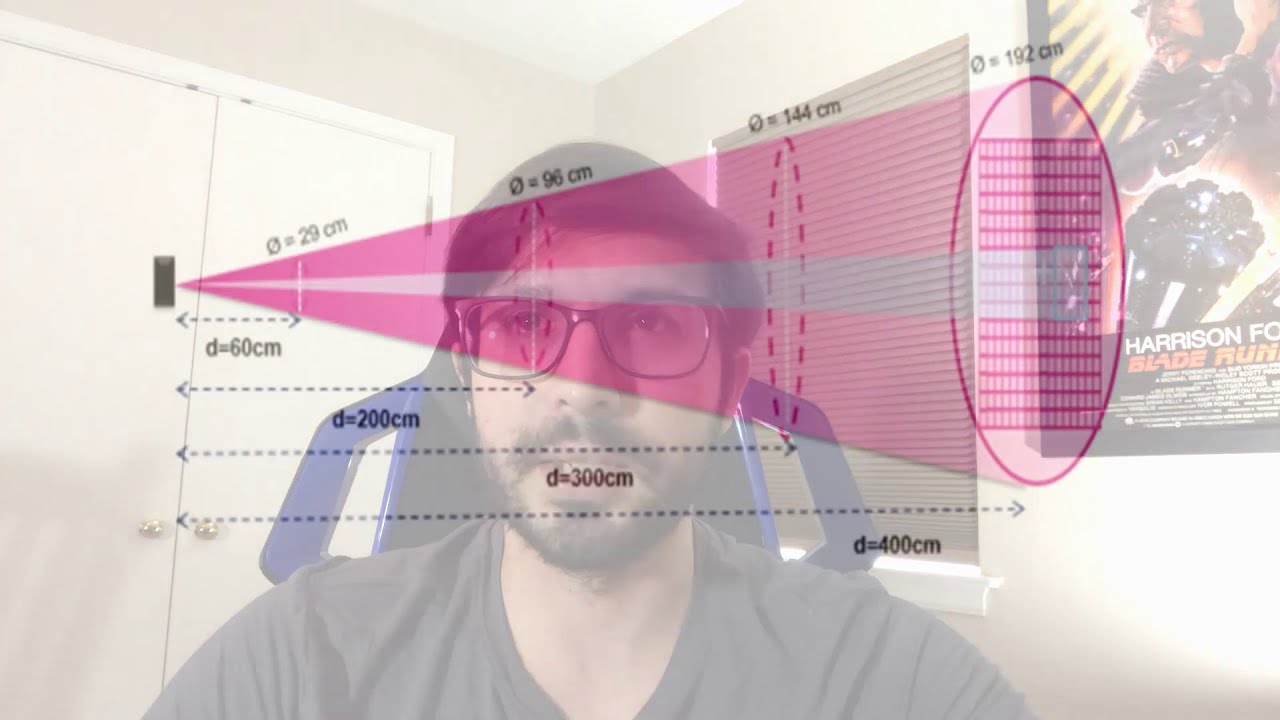
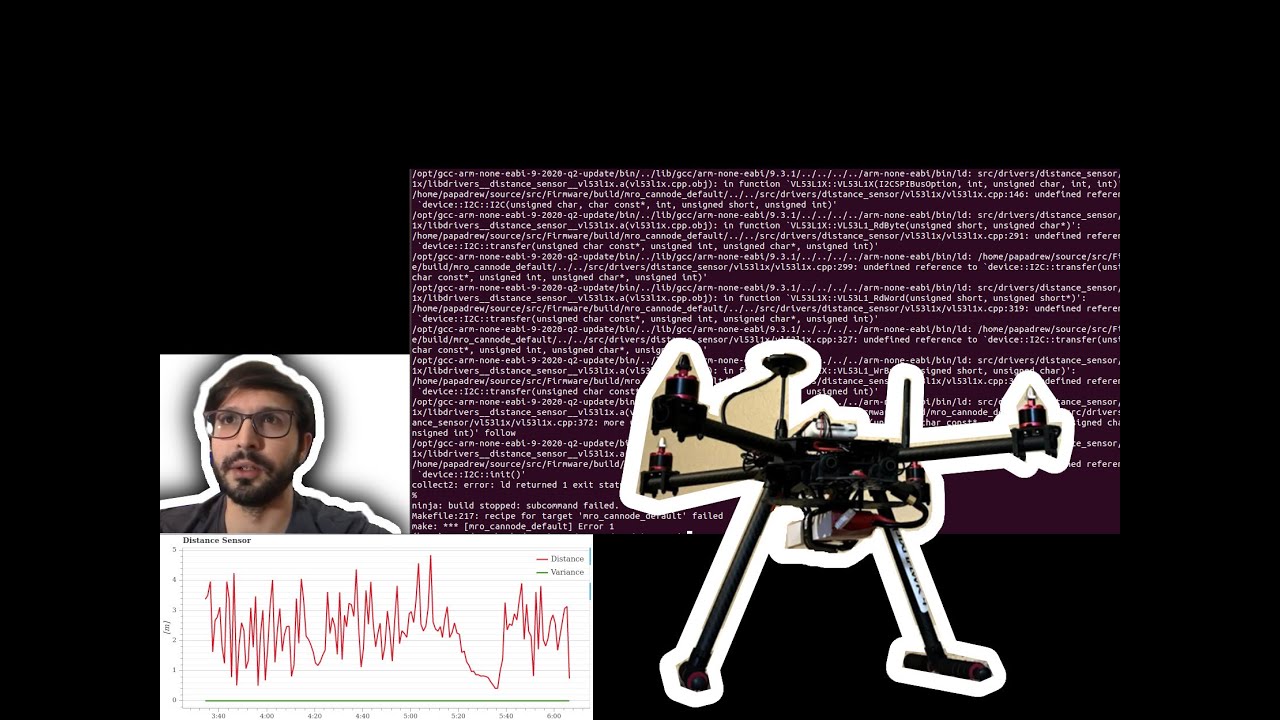
In this video I do a quick tutorial on how to setup collision prevention in PX4 stack using a single forward facing rangefinder. Make sure the distance sensor is enabled first (e.g. SENS_EN_XXXX or SENS_XXXX_CFG). If you are using a tfmini rangefinder, make sure you have SENS_TFMINI_CFG enabled to use the correct UART before testing. After this setup, make sure you account for directions where you have no rangefinders. The drone will not avoid an obstacle unless you have side sensors as well, but it will prevent you from colliding with an object in front. FYI this does not show how to use obstacle avoidance in PX4, which requires a companion computer and a depth + RGB camera. Collision prevention can be used independently of obstacle avoidance. Consider supporting this channel! Subscribe and share! You can also financially support the channel -Get $20 off your order of barbell apparel clothing (orders of $150 or more): https://www.barbellapparel.com/ANDREW... Any support is appreciated!
Comments