Беспилотники с открытым исходным кодом. Камера глубины обеспечивает быстрое позиционирование VINS скачать в хорошем качестве
Беспилотники с открытым исходным кодом. Камера глубины обеспечивает быстрое позиционирование VINS
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Беспилотники с открытым исходным кодом. Камера глубины обеспечивает быстрое позиционирование VINS в качестве 4k
У нас вы можете посмотреть бесплатно Беспилотники с открытым исходным кодом. Камера глубины обеспечивает быстрое позиционирование VINS или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Беспилотники с открытым исходным кодом. Камера глубины обеспечивает быстрое позиционирование VINS в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Беспилотники с открытым исходным кодом. Камера глубины обеспечивает быстрое позиционирование VINS
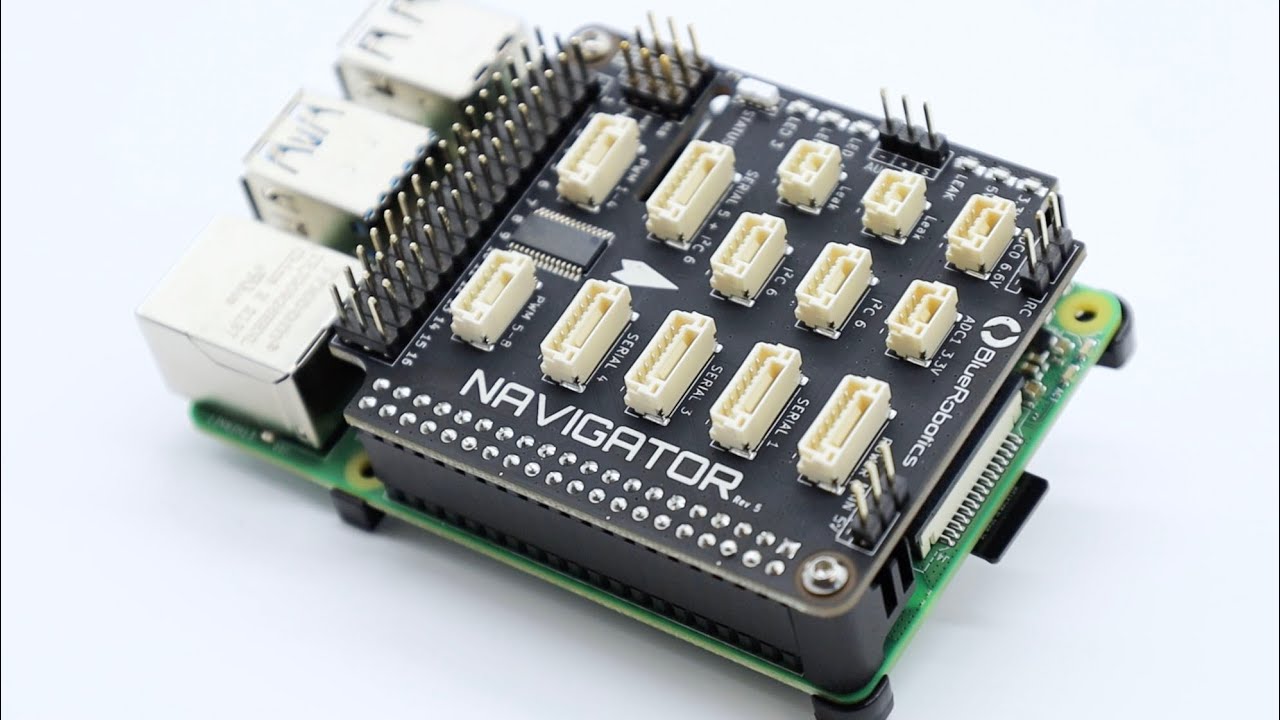
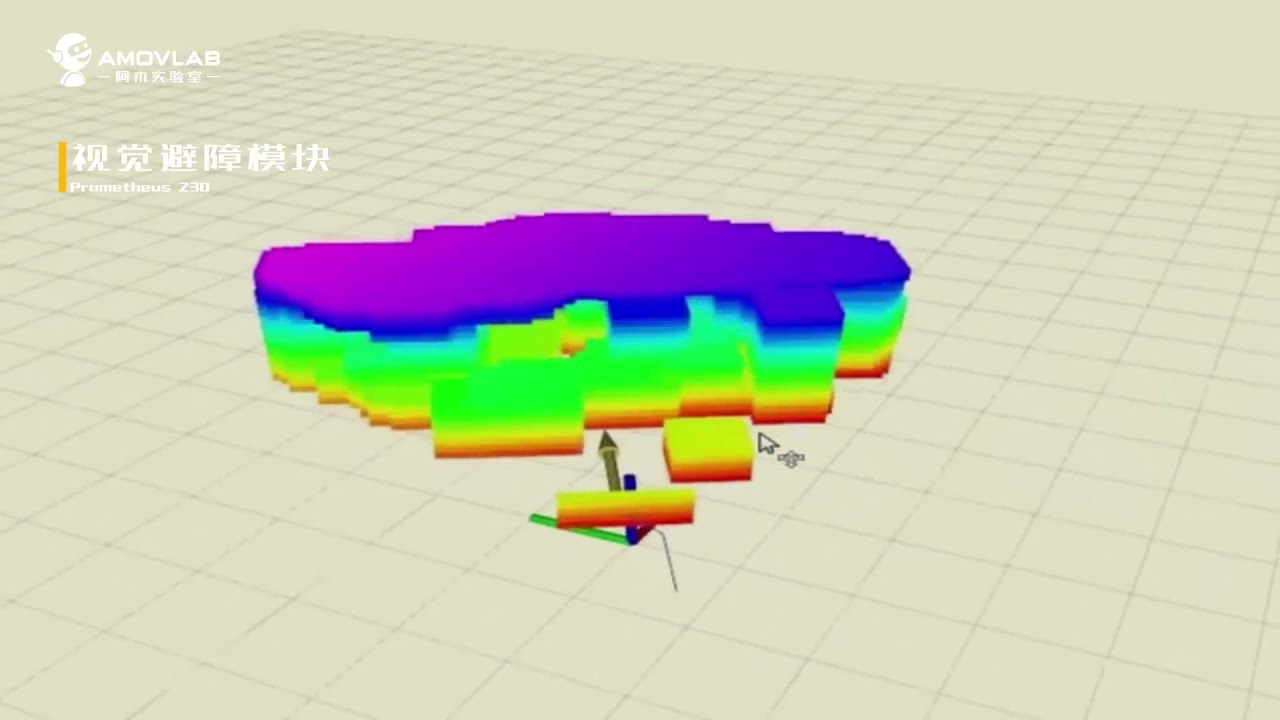
#Opensourcedrone #Drones #ROS #UAV #UAVdevelopment #VisionbasedUAV #Opensource #Drone Prometheus 230 (P230) - это миниатюрная платформа для разработки БПЛА, разработанная компанией Amovlab для ученых и разработчиков космических аппаратов, которая подходит для проверки и разработки алгоритмов позиционирования/навигации/обхода препятствий на основе технического зрения в среде без GPS и исследования сетевого взаимодействия БПЛА внутри помещений. Основанный на алгоритме Egoplanner из P450, P230 дополнительно интегрирует алгоритм VINS_Fusion VIO из HKUST, так что камера глубины D435i может заменить камеру слежения T265. С помощью датчика и набора интегрированных алгоритмов можно одновременно реализовать ВИЗУАЛЬНОЕ позиционирование и визуальное избегание препятствий БПЛА. --------------- О компании Amovlab: Основанная в 2016 году, компания Amovlab предоставляет аппаратные и программные инструменты с открытым исходным кодом и курсы для исследований и разработок в области мобильной робототехники. Наша главная цель - сделать НИОКР более эффективными. Благодаря работе технологического сообщества мы сформировали проект автономного беспилотника Prometheus с открытым исходным кодом и поддерживающие его аппаратные устройства серии P. Проект сопряжен с различными периферийными интеллектуальными решениями, такими как формирование в помещении/на улице, визуальное отслеживание стручков и ступенчатые образовательные решения. Также поддерживается симуляционный хост, датчики зрения/глубины, устройства связи с высокой пропускной способностью и другие периферийные запасные части. Наконец, мы создали триединство проектов робототехники с открытым исходным кодом, инструментов разработки аппаратного и программного обеспечения, образовательных решений и услуг сообщества. В то же время, придерживаясь концепции "делать трудно, но правильно", мы постепенно сосредоточимся на области визуализации проектирования роботов и программного обеспечения для моделирования, чтобы еще больше повысить эффективность разработки роботов. --------------- Для получения дополнительной информации, пожалуйста, посетите: https://www.amovlab.com или напишите нам service@amovauto.com
Comments