Nonlinear Model Predictive Control скачать в хорошем качестве
Nonlinear Model Predictive Control
11 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Nonlinear Model Predictive Control в качестве 4k
У нас вы можете посмотреть бесплатно Nonlinear Model Predictive Control или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Nonlinear Model Predictive Control в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Nonlinear Model Predictive Control
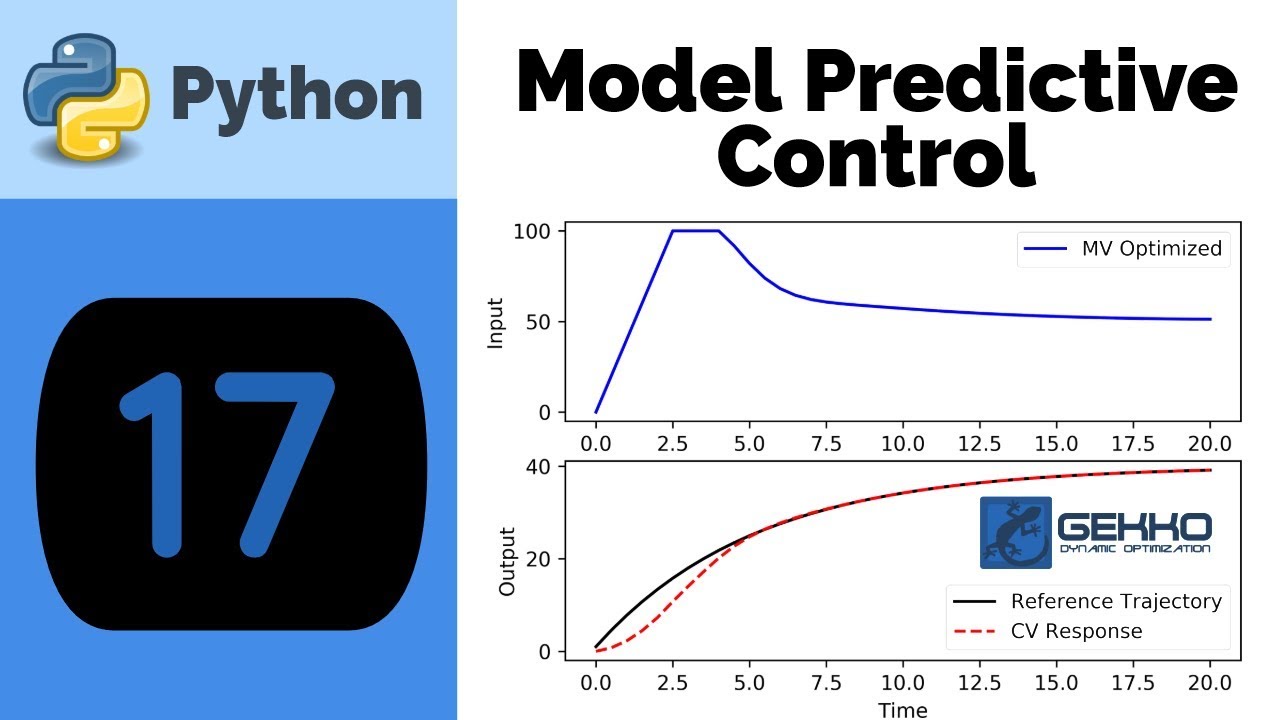
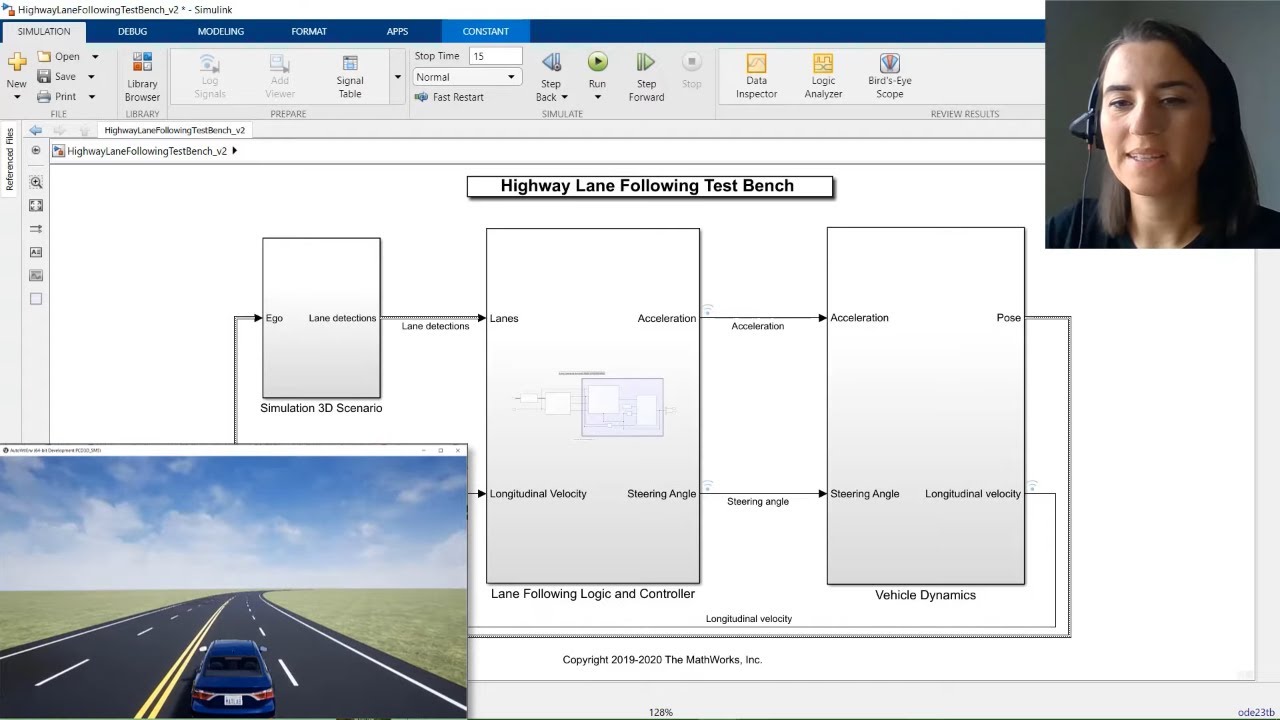
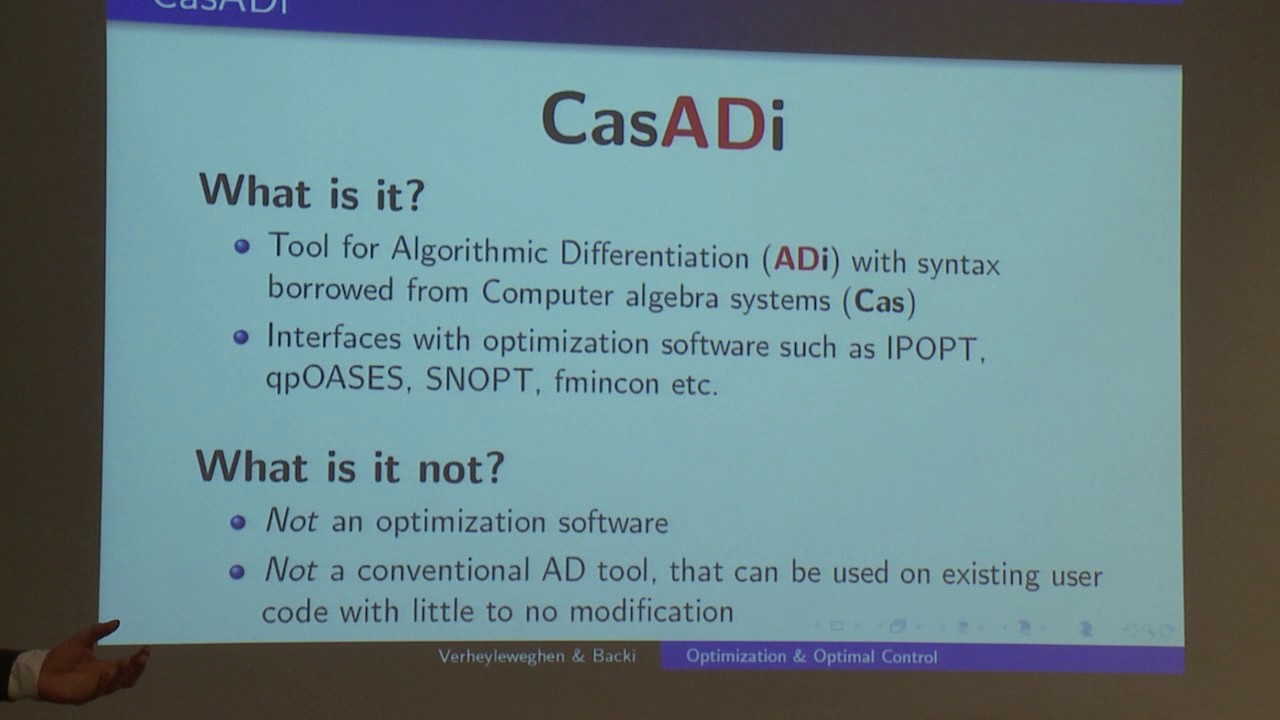
For more information, visit us at: http://www.maplesoft.com/products/?re... This webinar begins with a quick and painless introduction to basic concepts of optimal control and model predictive control (MPC). We will derive Pontryagin’s maximum principle. The only prerequisite is familiarity with Lagrange multipliers. To solve optimality conditions in real time, the continuation GMRES method for nonlinear MPC will be introduced. This method has been implemented in a Maple application by Cybernet, Japan, available in the Application Center. We will review this worksheet, which includes automatic code generation for NMPC controllers. The example problem in this worksheet is to control the position and orientation of a hovercraft. You can easily change the definition of the system in the worksheet and generate a MPC controller for your application.
Comments