I am Not Afraid of the Jammer: Navigation in a GPS-Denied Environment with Signals of Opportunity скачать в хорошем качестве
I am Not Afraid of the Jammer: Navigation in a GPS-Denied Environment with Signals of Opportunity
10 часов назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: I am Not Afraid of the Jammer: Navigation in a GPS-Denied Environment with Signals of Opportunity в качестве 4k
У нас вы можете посмотреть бесплатно I am Not Afraid of the Jammer: Navigation in a GPS-Denied Environment with Signals of Opportunity или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон I am Not Afraid of the Jammer: Navigation in a GPS-Denied Environment with Signals of Opportunity в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
I am Not Afraid of the Jammer: Navigation in a GPS-Denied Environment with Signals of Opportunity
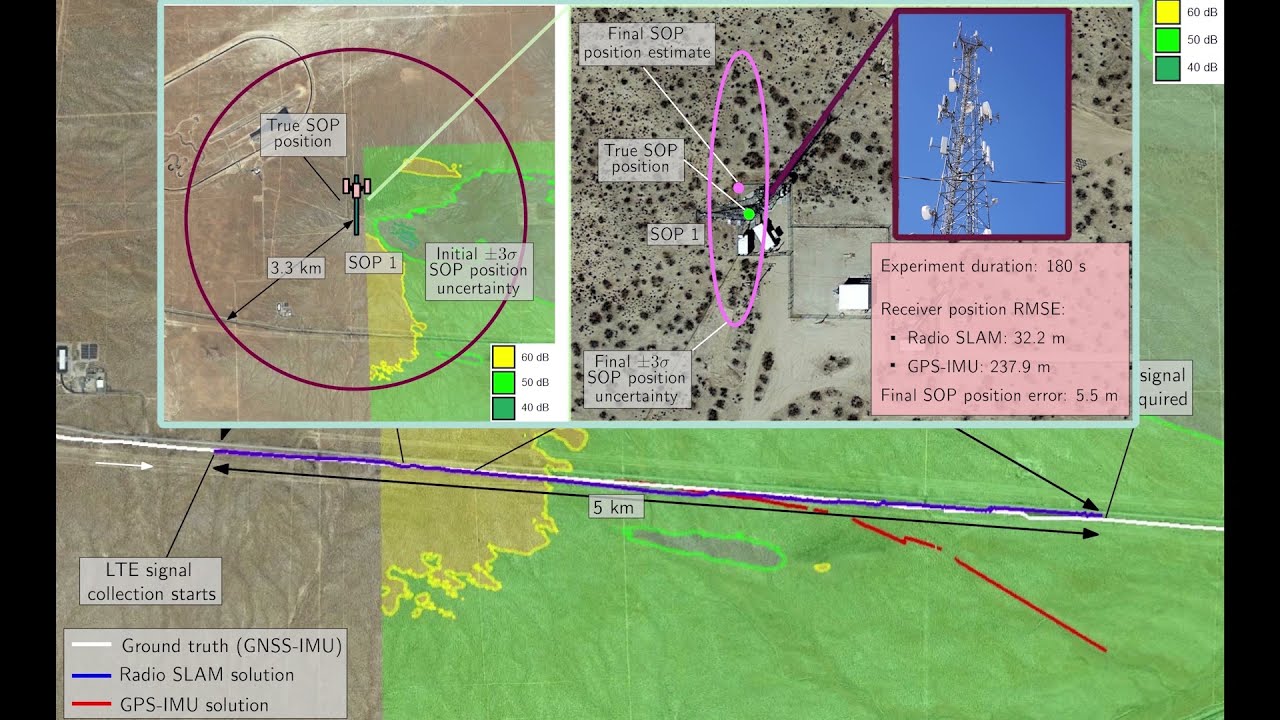
This video presents a radio simultaneous localization and mapping (radio SLAM) approach that enables the exploitation of ambient signals of opportunity (SOPs) to produce an accurate navigation solution in GPS denied environments. The framework could produce an SOP-derived navigation solution in a standalone fashion or by fusing SOPs with sensors (e.g., inertial measurement unit (IMU), lidar, etc.), digital maps, and/or other signals (e.g., GNSS). This video shows the first published experimental results evaluating the efficacy of radio SLAM in a real GPS-denied environment, which took place at Edwards Air Force Base, California, USA, during which GPS was intentionally jammed with a jamming-to-signal (J/S) ratio as high as 90 dB. The vehicle’s GPS-IMU system drifted from the vehicle’s ground truth trajectory, resulting in a position root mean-squared error (RMSE) of 238 m. In contrast, the radio SLAM approach with a single cellular LTE SOP whose position was poorly known (an initial uncertainty on the order of several kilometers) achieved a position RMSE of 32 m. Music: https://www.bensound.com
Comments



















