High - higher - bolt-inserting robot: support for the construction of wind towers скачать в хорошем качестве
High - higher - bolt-inserting robot: support for the construction of wind towers
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: High - higher - bolt-inserting robot: support for the construction of wind towers в качестве 4k
У нас вы можете посмотреть бесплатно High - higher - bolt-inserting robot: support for the construction of wind towers или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон High - higher - bolt-inserting robot: support for the construction of wind towers в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
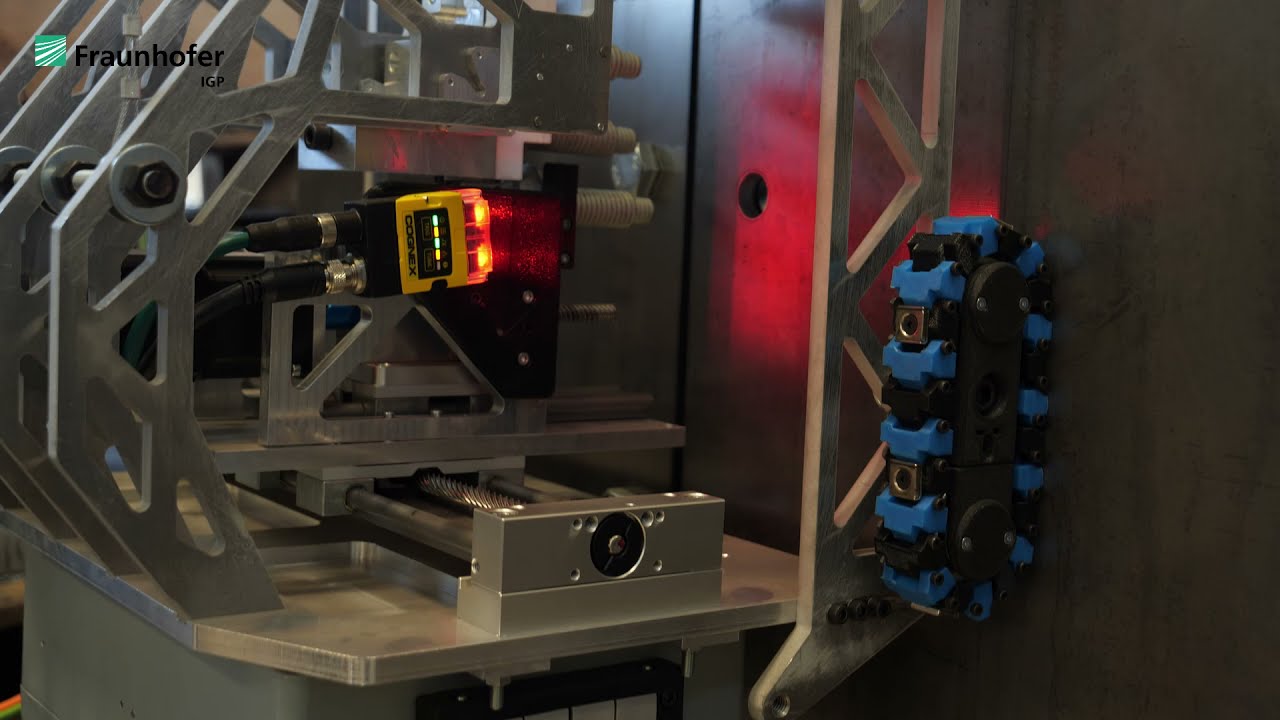
High - higher - bolt-inserting robot: support for the construction of wind towers
Green electricity from wind turbines already makes an important contribution to climate protection. In order to be able to use wind turbines in regions with little wind, wind tur-bines with ever greater hub heights must be built. The increasing heights of wind towers also pose new challenges for tower builders. With the alternative construction of wind turbine towers in panel design, the economic efficiency decreases in comparison to the conventional construction method and the tower height continues to increase, and the construction of the towers becomes more and more expensive. The Fraunhofer IGP has therefore developed an automation solution for the mechanical joining of the panels together with an industrial partner. A bolt insertion robot supports the tower builder in assembling the elements. The fitter merely screws on the joining part of the connection system from the inside of the tower and then brings the parts together. The connecting systems are fed automatically from the outside of the tower. The bolt insertion robot moves autonomously through the connection points. To carry out the insertion process, the developed bolt insertion robot is pulled upwards at a predefined speed by means of a cable winch mounted on the panel. During this movement, the joining area on the panel is continuously monitored and evaluated by an image processing sensor mounted on the selection axis. If a joint is detected in the evaluation area of the sensor, the coor-dinates of the joint determined by the sensor are transferred to a higher-level control system. With the help of these coordinates, the control system calculates the required positions of the axes of the insertion system and carries out the bolt insertion process fully automatically.
Comments