***SOLVED*** PixHawk PX4 VTOL Won't Arm скачать в хорошем качестве
***SOLVED*** PixHawk PX4 VTOL Won't Arm
9 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ***SOLVED*** PixHawk PX4 VTOL Won't Arm в качестве 4k
У нас вы можете посмотреть бесплатно ***SOLVED*** PixHawk PX4 VTOL Won't Arm или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ***SOLVED*** PixHawk PX4 VTOL Won't Arm в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
***SOLVED*** PixHawk PX4 VTOL Won't Arm
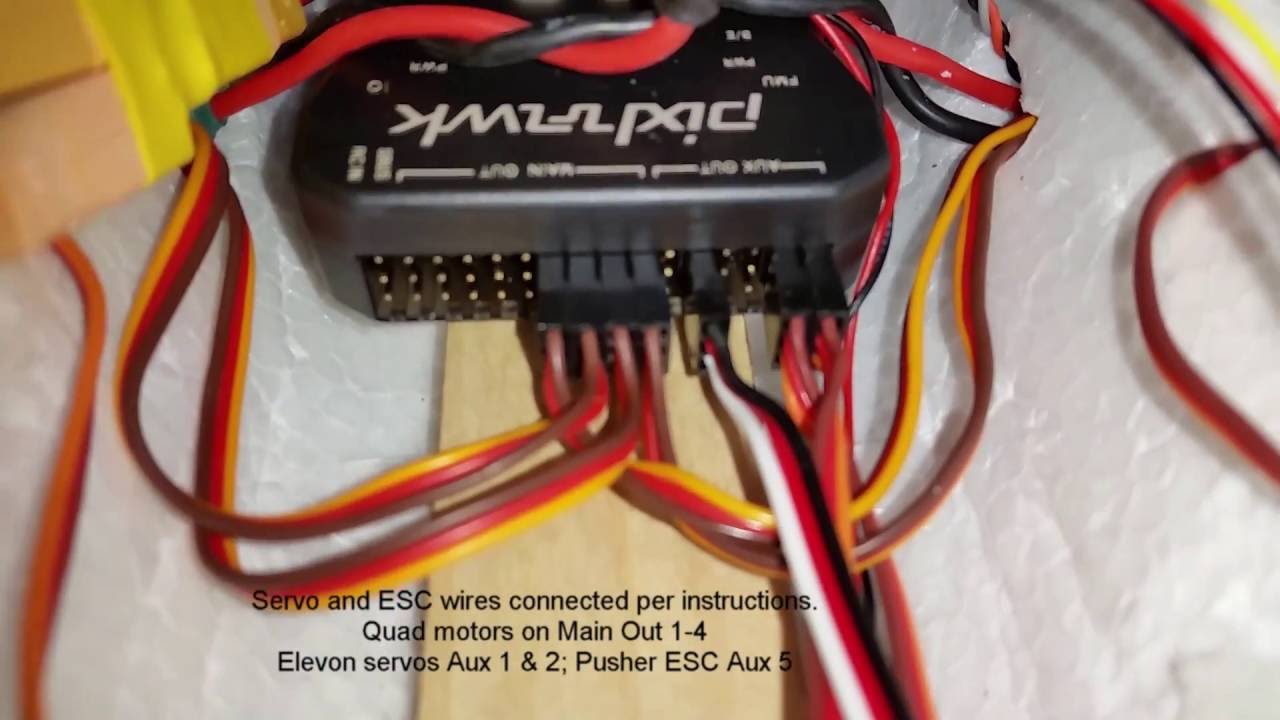
**SOLVED** Updated QGroundControl to 3.0 Used Master firmware (at my own risk) instead of Stable version. This made available parameter settings not available in Stable version. Pusher motor ESC cable needs to be plugged in AUX3 NOT AUX5 like the manual says. Tx Transition switch needs to be set RC_MAP_TRANS_SW to 5 and remove the mapping from AUX1 Passthrough in QGC. I'm a newbie with Pixhawk. My setup experience is with Tarot ZYX-M and Naza. I think I've followed every step in setting up this QuadPlane VTOL via QGroundControl UI. All required sensors and ESCs have been calibrated per instructions but it won't arm. PM me for params file to look through. The forward flight motor ESC just beeps, even though it's been calibrated directly from the Rx. I've had it with and without the Airspeed sensor. I use a Pix4 Airspeed v1.1 but it only recognizes the Airspeed sensor by setting SENS_DPRES_ANSC to 1000 and SENS_DPRES_OFF to 1. I've also tried CBRK_AIRSPD_CHK to 16212 FW_ARSP_MODE doesn't show up in the Parameters Search.
Comments








![pixhawk motor issue - motor wont spin or calibrate [SOLVED]](https://imager.clipsaver.ru/ek_lswf2soY/max.jpg)





![☀ FPV АВТО - автономный РОВЕР! Настройка MAVLINK через WiFi. [FPV RC Car | Ardurover]](https://imager.clipsaver.ru/GX0eJP3EMvM/max.jpg)



