PIC16F877A based DC motor speed control using PWM pin. Hardware demonstration and MikroC Coding. скачать в хорошем качестве
PIC16F877A based DC motor speed control using PWM pin. Hardware demonstration and MikroC Coding.
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: PIC16F877A based DC motor speed control using PWM pin. Hardware demonstration and MikroC Coding. в качестве 4k
У нас вы можете посмотреть бесплатно PIC16F877A based DC motor speed control using PWM pin. Hardware demonstration and MikroC Coding. или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон PIC16F877A based DC motor speed control using PWM pin. Hardware demonstration and MikroC Coding. в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
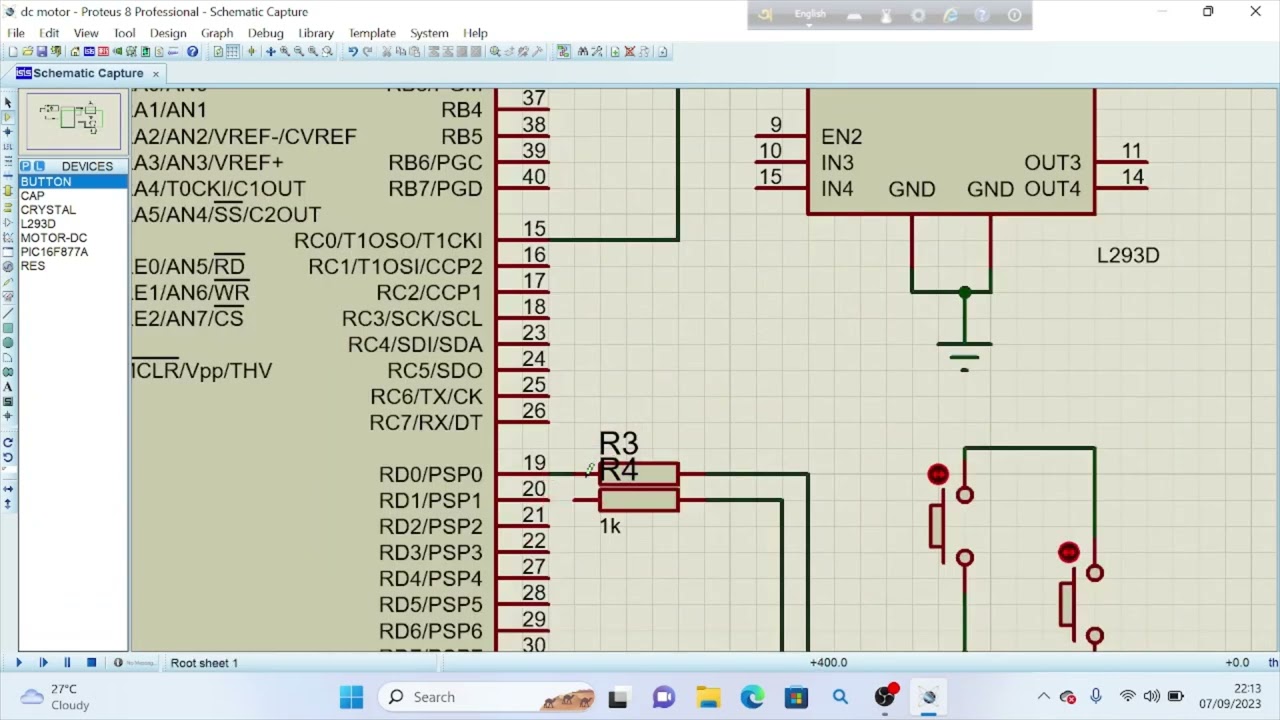
PIC16F877A based DC motor speed control using PWM pin. Hardware demonstration and MikroC Coding.
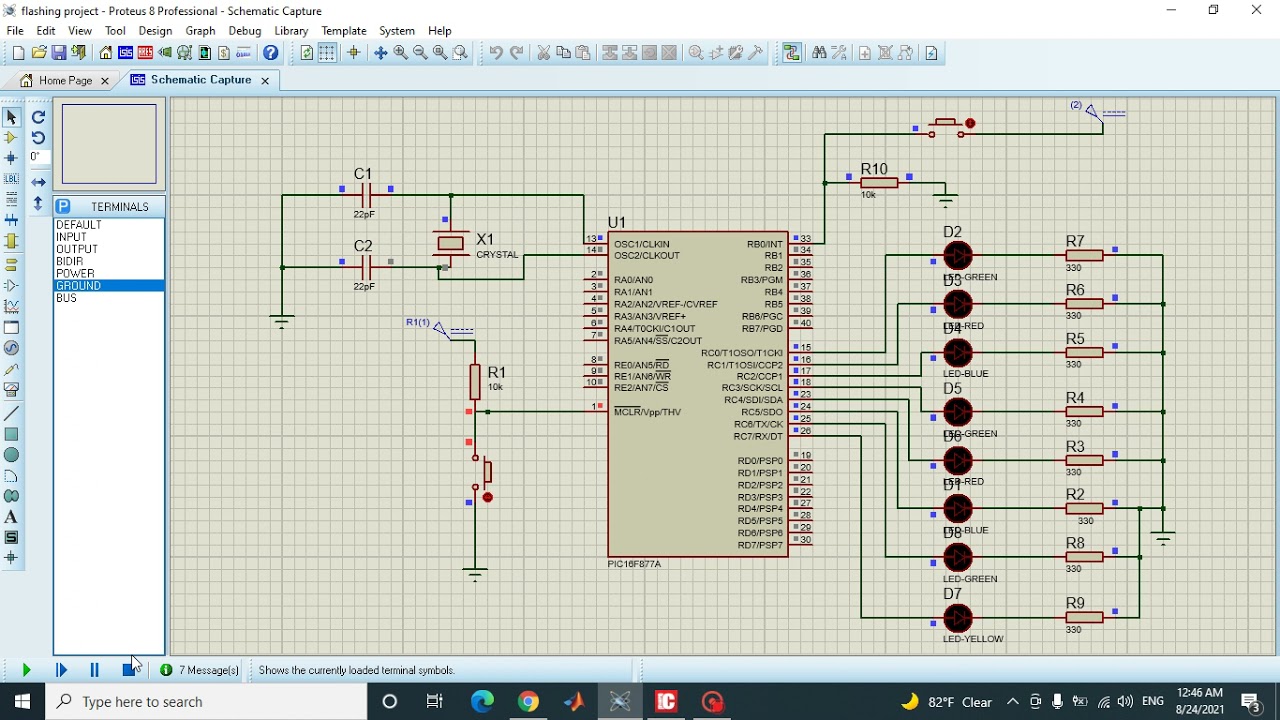
Guys, My lectures are free for everyone. If you want to support my channel, then become a Youtube member by following link below: / @learningmicrocontrollers3561 Seek knowledge from the cradle to the grave /// /////////////////////////////////////////////////////**********************************///////////////////////////////// Hello guys, Welcome to Learning Microcontrollers youtube Channel, Guys I have also compiled course on Udemy as well. Where you will learn under my direct supervision in a more supervised way. Here is the links to the courses I have on Udemy, By taking any of these courses you will be supporting my channel aswell. This will help me to make more videos with better hardware in the future. I hope you look forward to it. Courses Links: 1- https://www.udemy.com/course/pic16f87... 2- https://www.udemy.com/course/mikroc-f... 3- https://www.udemy.com/course/mikroc-f... 4- https://www.udemy.com/course/pic-micr... 5- https://www.udemy.com/course/learn-ar... ///////////////////////////////////////////////////// Hello guys, Speed control of a DC motor is a very important job to be done in any automation application mostly incase of robots. This video is a detailed tutorial about how you can control the speed of a DC motor using PIC16F877A microcontroller. How to setup your PIC16F877A board video link: • Setting up a PIC16F877A/PIC16F887/PIC18F**** Coding in the video is as under: int duty; void main() { PWM1_Init(5000); /// 5000 = 5khz Delay_ms(100); duty = 255; while(1) { PWM1_Start(); duty = duty - 1; Delay_ms(200); PWM1_Set_Duty(duty); if ( duty == 0 ) { duty = 255; Delay_ms(200); } } } `
Comments











![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)