LOCOBOT LOW COST MODULAR ROBOTIC CO-WORKER TOOLBOX starters scenario скачать в хорошем качестве
LOCOBOT LOW COST MODULAR ROBOTIC CO-WORKER TOOLBOX starters scenario
13 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: LOCOBOT LOW COST MODULAR ROBOTIC CO-WORKER TOOLBOX starters scenario в качестве 4k
У нас вы можете посмотреть бесплатно LOCOBOT LOW COST MODULAR ROBOTIC CO-WORKER TOOLBOX starters scenario или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон LOCOBOT LOW COST MODULAR ROBOTIC CO-WORKER TOOLBOX starters scenario в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
LOCOBOT LOW COST MODULAR ROBOTIC CO-WORKER TOOLBOX starters scenario
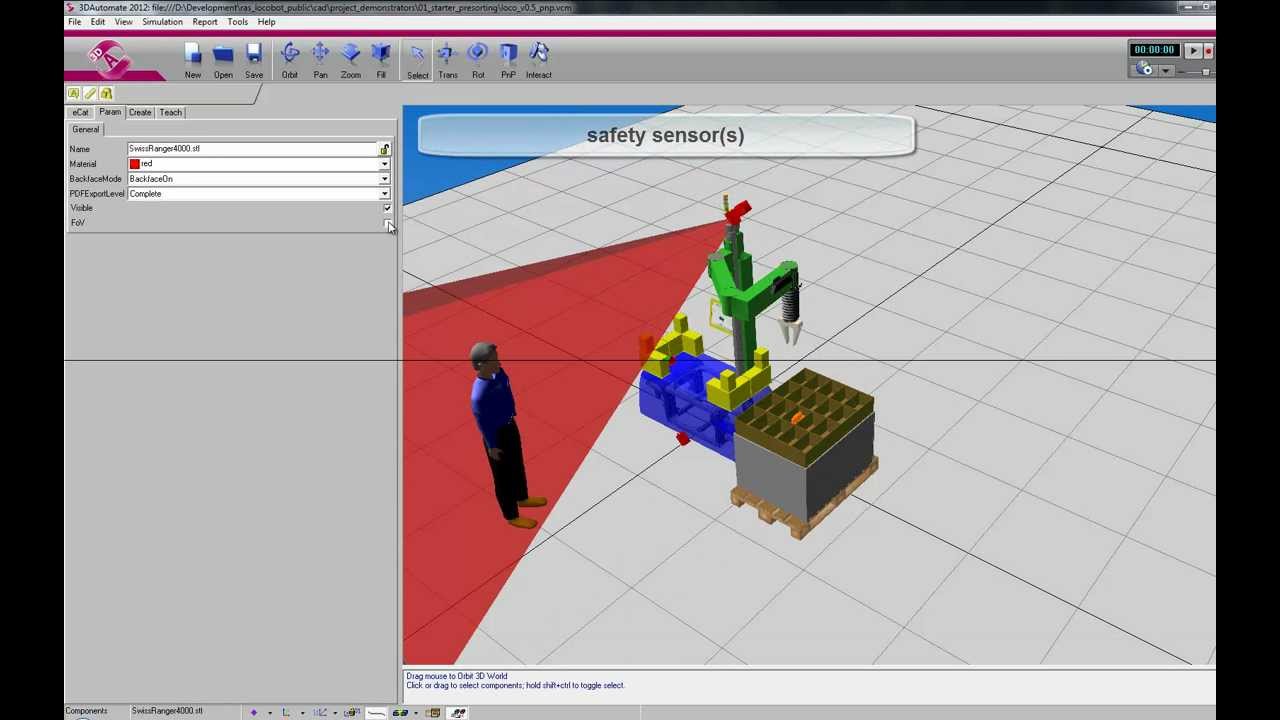
The LOCOBOT project funded by the EU commission Grant 260101 http://www.locobot.eu proposes a toolkit for building customized low cost robot co-workers for a broad spectrum of scenarios. The system approach envisaged keeps the human worker in the loop. So far the approach is user centered design. LOCOBOT creates a tool-kit for low-cost robot assistants built from a set of plug-and-produce kinematic modules with compliant, but precise actuators and intelligent sensing for man-machine cooperation. These scenario-driven systems are socially accepted by the worker. The tool-kit will provide higher flexibility, adaptivity and scalability that are all required to enable greener, more customized and high quality products. Particu- larly the automotive industry will benefit from LOCOBOT by having a robot assistant that can be quickly reconfigured in terms of its kinematic structure as well as its tasks. This allows them to make manual production processes much more efficient, to quickly up-scale a production process if required and to improve working conditions by reducing the need to lift heavy objects (such as wheel hub drives for the e-vehicle). Technologically we have to address three major objectives: • Modular plug-and-produce robotic assistant platform: The robot will consist of a set of kinematic modules built upon a mobile platform. The single modules have to be lightweight and compliant to enable safe cooperation with humans. Furthermore the modules have to be mechanically standardized to allow the configuration of different kinematic structures. Simple electrical and software interface have to support a quick and easy re-configuration. • Re-configuration and adaptive control for P&P components: The key objective is to avoid time-consuming reprogramming and setup of control algorithms and software. Control algorithms need to be adaptive and self-optimizing to account for the different kinematic structures, to deal with oscillations induced by the mobile platform and to achieve precise positioning despite "soft" and compliant modules. The modules will be virtually assembled and the whole kinematic structure will be pre-programmed for a given task. This will be based on simulation tools that include not only the robot but also the environment and human workers. The results will be an automatically generated code that can be downloaded to the robot. • Intelligent sensing and actuating structures: Not all the uncertainties of the real world can be covered by the simulation. Consequently, the robot will be equipped with a stereo camera system and audio components to acquire and process audio- visual information. This will be required for the robot to learn and to cooperate with human workers.
Comments









![1 A.M Study Session 📚 [lofi hip hop]](https://imager.clipsaver.ru/lTRiuFIWV54/max.jpg)
![Как измеряют самые слабые силы во Вселенной? [Veritasium]](https://imager.clipsaver.ru/6lK2JVwajTw/max.jpg)

![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)