Probabilistic decision model for adaptive task planning in human-robot collaborative assembly ... скачать в хорошем качестве
Probabilistic decision model for adaptive task planning in human-robot collaborative assembly ...
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Probabilistic decision model for adaptive task planning in human-robot collaborative assembly ... в качестве 4k
У нас вы можете посмотреть бесплатно Probabilistic decision model for adaptive task planning in human-robot collaborative assembly ... или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Probabilistic decision model for adaptive task planning in human-robot collaborative assembly ... в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Probabilistic decision model for adaptive task planning in human-robot collaborative assembly ...
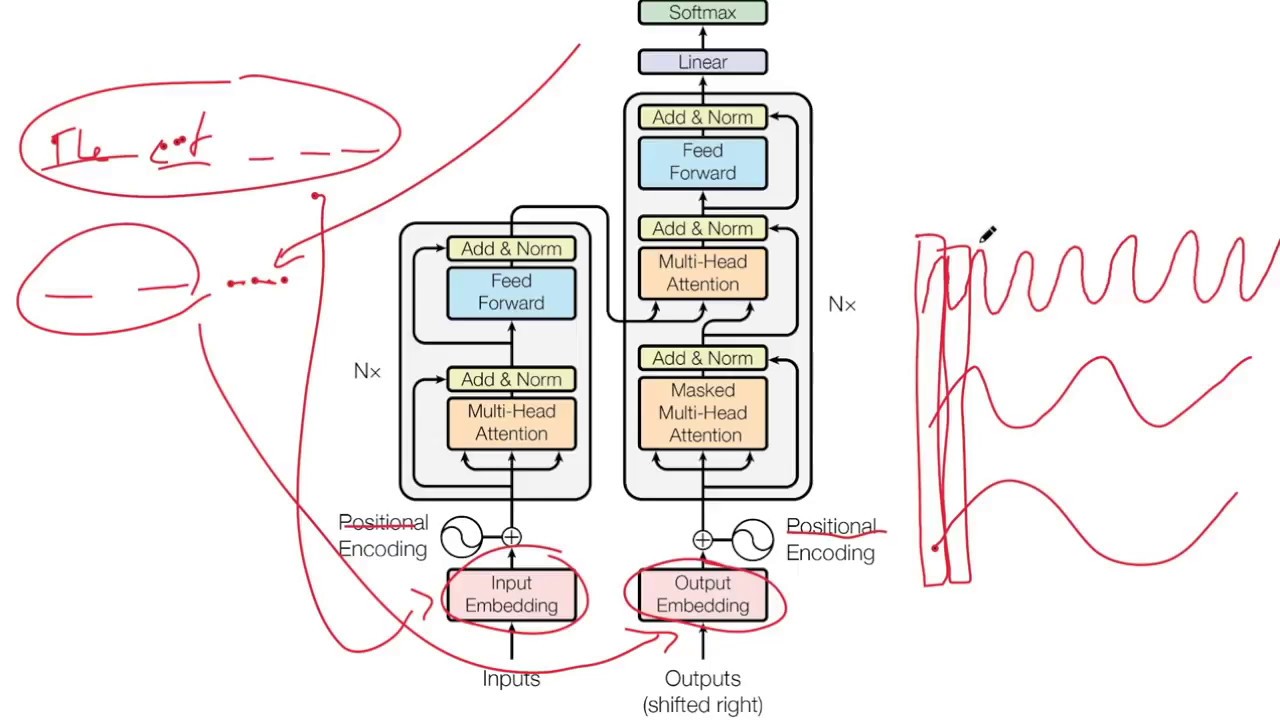
Martijn Cramer*, Karel Kellens, Eric Demeester - Probabilistic decision model for adaptive task planning in human-robot collaborative assembly based on designer and operator intents In manufacturing industry, the era of mass customization has arrived. Combining the complementary strengths of humans and robots will allow to cope with growing product diversity and fluctuating demands. When collaborating, human and robot operate in a shared workspace to assemble a common product and it has to be decided how tasks are distributed between them. In previous work, human operators have often been modeled as controllable agents whose actions can be planned beforehand. To achieve a natural collaboration, we believe that the robot has to estimate the operator’s assembly intentions and has to behave accordingly. This work presents a framework for planning collaborative robot tasks in assembly, considering both the designer and operator intents. From the designer’s CAD data, a set of potential assembly plans is automatically derived and translated into a state graph from which the operator intentions follow. To enable the robot to act optimally under a given belief of operator intentions, a partially observable Markov decision process (POMDP) is formulated, whose state space is represented by the intention graph. This paper demonstrates that the proposed approach is able to estimate the true operator intent based on observations about the parts and tools manipulated during collaborative assembly. *Corresponding author: martijn.cramer@kuleuven.be
Comments