🚀 Полноценная разработка ПИД-регулятора с использованием алгоритма корневого годографа и Python. скачать в хорошем качестве
🚀 Полноценная разработка ПИД-регулятора с использованием алгоритма корневого годографа и Python.
6 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: 🚀 Полноценная разработка ПИД-регулятора с использованием алгоритма корневого годографа и Python. в качестве 4k
У нас вы можете посмотреть бесплатно 🚀 Полноценная разработка ПИД-регулятора с использованием алгоритма корневого годографа и Python. или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон 🚀 Полноценная разработка ПИД-регулятора с использованием алгоритма корневого годографа и Python. в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
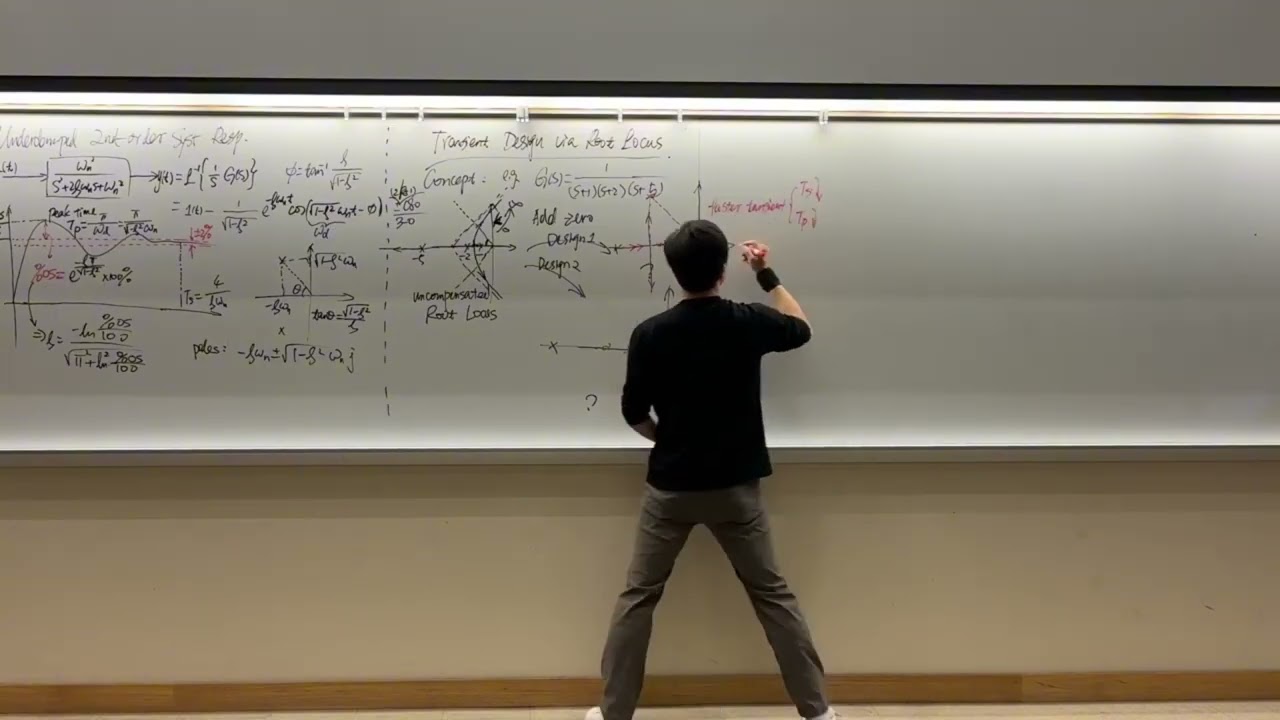
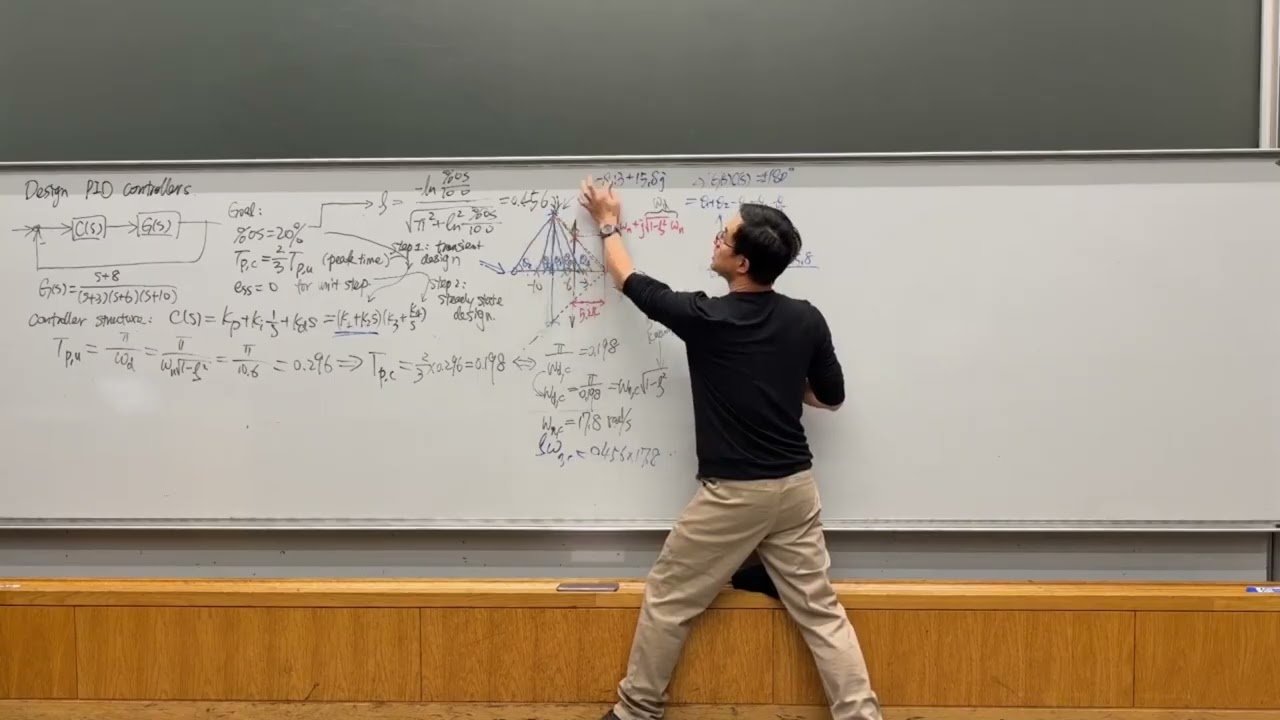
🚀 Полноценная разработка ПИД-регулятора с использованием алгоритма корневого годографа и Python.
Этот подробный учебный материал рассматривает проектирование ПИД-регулятора «всё в одном», объединяя аналитические методы построения корневого годографа с практической реализацией на Python. Начиная с объекта третьего порядка, мы определяем конкретные требования к производительности по перерегулированию, времени достижения пикового значения и ошибке в установившемся режиме. Занятие разделено на два основных этапа: Аналитическое проектирование: Мы используем методы построения корневого годографа на плате для преобразования целевых показателей производительности в желаемые положения полюсов замкнутой системы. Затем мы вычисляем необходимое размещение нулей ПД-регулятора для улучшения переходных процессов и определяем интегральное действие, необходимое для устранения ошибки в установившемся режиме. Вычислительная реализация: Используя Python и библиотеку управления, мы проверяем наши ручные вычисления, строим графики корневого годографа и моделируем переходные процессы нескомпенсированной (P), улучшенной с точки зрения переходных процессов (PD) и окончательной ПИД-системы. К концу этого видео вы увидите, как теоретическое условие угла 180° и приближения второго порядка напрямую преобразуются в функциональный код, обеспечивающий точные цели управления. 00:00 Введение в сессию и постановка задачи 01:10 Структура контроллера: разложение ПИД-регулятора на переходную (ПД) и установившуюся (У) части 02:11 Перевод целевых показателей производительности: перерегулирование в коэффициент демпфирования (дзета) 03:34 Анализ корневого годографа для нескомпенсированной системы третьего порядка 05:00 Приближение второго порядка и расчеты пикового времени 07:31 Определение целевых мест расположения полюсов замкнутой системы 09:56 Размещение нулей ПД-регулятора: применение условия угла 180 градусов 14:14 Добавление интегрального действия: размещение нулей/полюсов для нулевой установившейся ошибки 15:58 Реализация на Python: настройка Control Toolbox и среды 16:45 Построение графика корневого годографа для выбора коэффициента усиления 18:59 Проверка полной конструкции ПД-регулятора на Python 20:41 Окончательная настройка ПИД-регулятора и проверка коэффициента усиления 22:10 Сравнение переходных процессов: производительность ПД-регулятора, ПД-регулятора и ПИД-регулятора 23:43 Анализ окончательных результатов и краткое изложение проекта
Comments