Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation скачать в хорошем качестве
Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation в качестве 4k
У нас вы можете посмотреть бесплатно Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
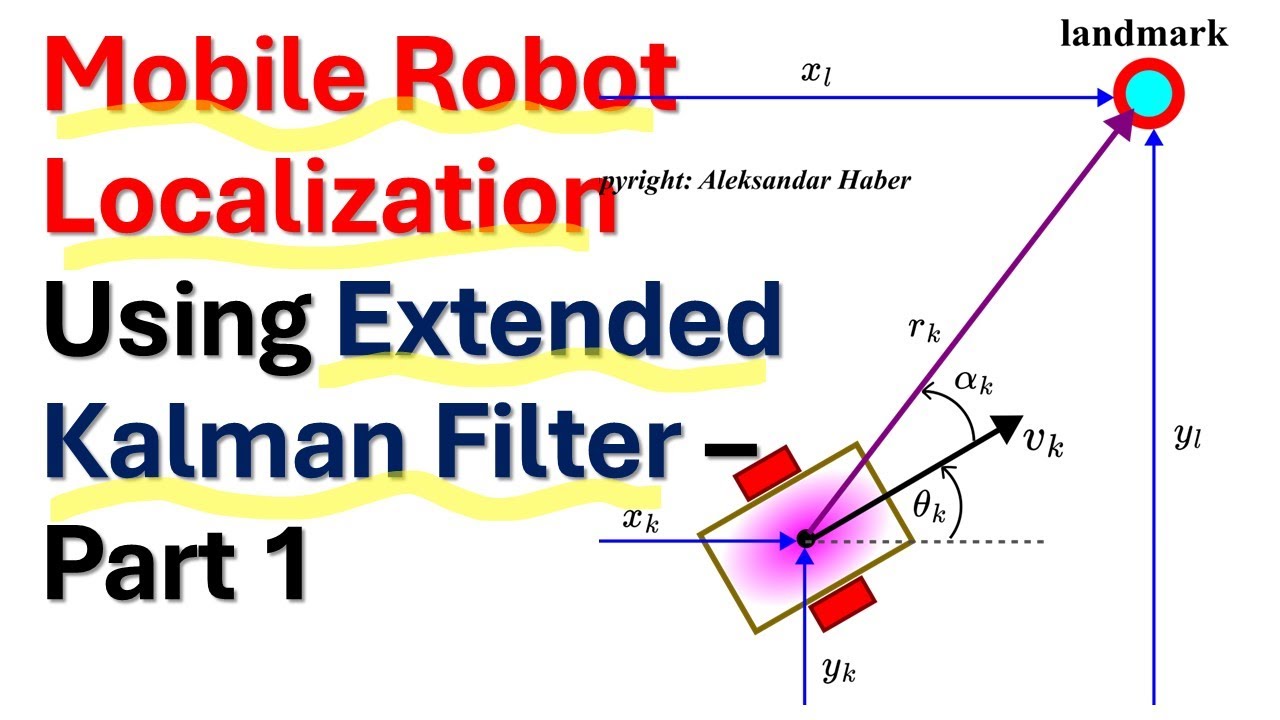
Mobile Robot Localization Using Extended Kalman Filter - Part 1: Problem Formulation
#python #statistics #probability #scipy #scientificcomputing #stats #bayesian #normaldistribution #statisticsvideolectures #controltheory #controlengineering #mechatronics #robotics #machinelearning #mechanicalengineering #electricalengineering #datascientist #slam #localization #dynamicalsystems #dynamics #machinelearning #robotics It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way: Buy me a Coffee: https://www.buymeacoffee.com/Aleksand... PayPal: https://www.paypal.me/AleksandarHaber Patreon: https://www.patreon.com/user?u=320801... You Can also press the Thanks YouTube Dollar button In this control theory, mobile robotics, and estimation tutorial we explain how to develop and implement an extended Kalman filter algorithm for localization of mobile robots. We explain how to use the extended Kalman filter to localize (estimate) the robot location and orientation (location and orientation are called the robot pose). We also explain how to implement the localization algorithm in Python from scratch. Here, we need to immediately state that the localization algorithm is developed under the assumption that the locations of external landmarks (markers) are known and that the landmark measurement correspondence is also known. In our second tutorial series, we will consider the case when the landmark measurement correspondence is not known, and in the third tutorial series, we will consider the case when both the landmark locations and their measurement correspondence are not known. Do not be confused if you currently do not understand what is landmark or what is landmark measurement correspondence. These terms will be explained in this tutorial series. This first tutorial part is organized as follows. First, we briefly summarize the kinematics model of the robot used in this tutorial series, as well as its odometry model. Based on these two models we derive the state equation of the mobile robot. We then derive the output equation that takes into account relative measurements with respect to external landmarks. We then briefly explain the landmark correspondence problem. Finally, we present the robot localization problem formulation.
Comments