Simulation of Turning Gaits for Hexapod Walking Robot скачать в хорошем качестве
Simulation of Turning Gaits for Hexapod Walking Robot
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Simulation of Turning Gaits for Hexapod Walking Robot в качестве 4k
У нас вы можете посмотреть бесплатно Simulation of Turning Gaits for Hexapod Walking Robot или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Simulation of Turning Gaits for Hexapod Walking Robot в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Simulation of Turning Gaits for Hexapod Walking Robot
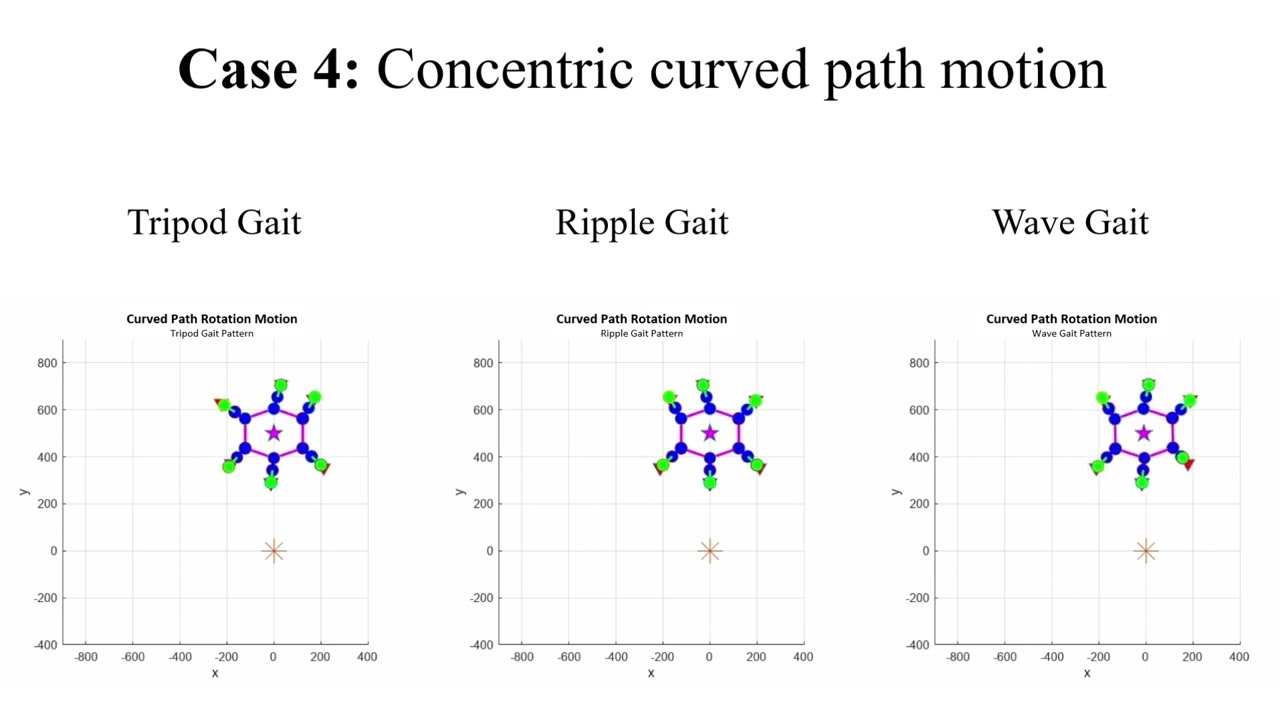
Kinematic Modeling and Simulation of Multi-Turning Gaits of Hexapod Walking Robot Abstract—To avoid various obstacles in real-life scenarios, legged robots adopt different skills. Curve walking is a dominant skill for multi-legged robots as it increases the maneuverability of the robot. This study focused on hexapod walking robot kinematic modeling and simulation using multi statically stable walking gaits on flat terrain. The forward and inverse kinematic model of the six-legged robot is developed. Trajectory planning for each step in both stance and swing phases is performed using higher-order polynomials. The effectiveness of the suggested approach is verified by performing a simulation of different gait types, including straight (forward and transverse), angular, and curved motion. MATLAB software is successfully utilized for the simulation process of the main hexapod walking gaits including, tripod, ripple, and wave gait.
Comments