Learning Control Sets for Lattice Planners скачать в хорошем качестве
Learning Control Sets for Lattice Planners
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Learning Control Sets for Lattice Planners в качестве 4k
У нас вы можете посмотреть бесплатно Learning Control Sets for Lattice Planners или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Learning Control Sets for Lattice Planners в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Learning Control Sets for Lattice Planners
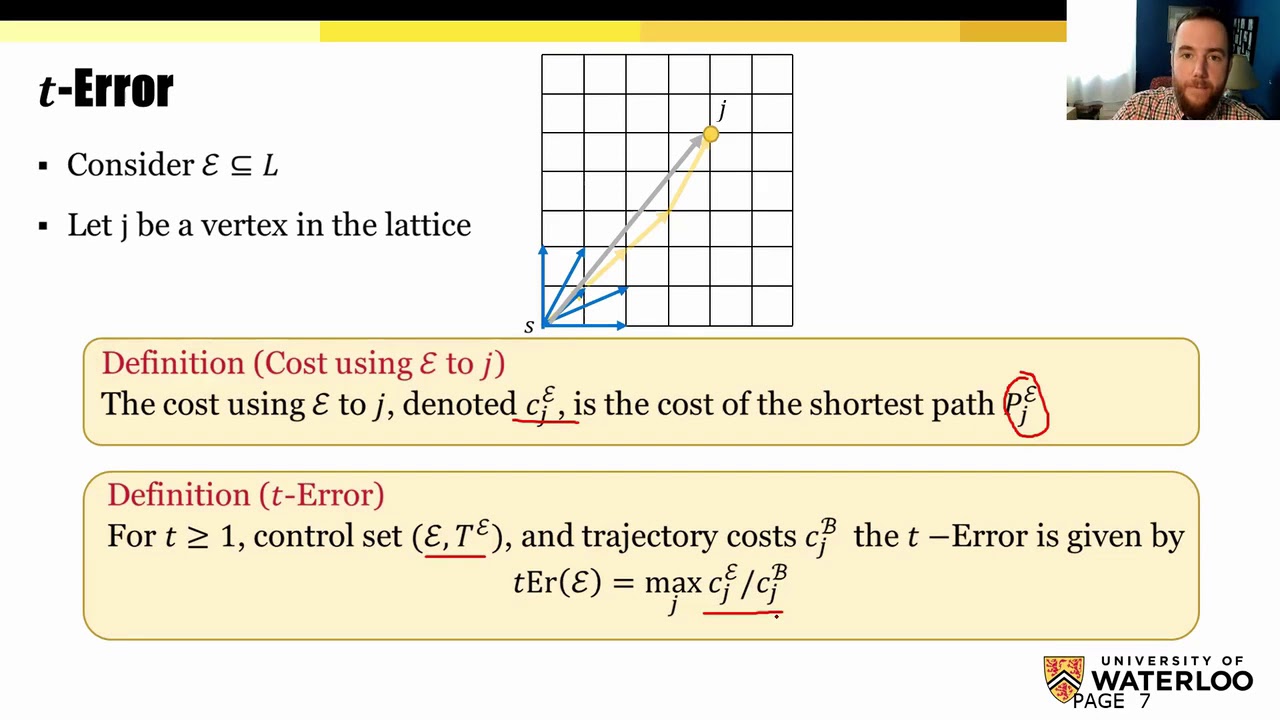
Title: Learning Control Sets for Lattice Planners from User Preferences Authors: Alexander Botros, Nils Wilde, Stephen L. Smith University of Waterloo, Canada Abstract: We investigate the design of a lattice-based motion planner that can capture user preferences. Given demonstrated trajectories we estimate a user cost function, and compute an optimal motion primitives that reflect the learned user preference. Further, we restrict the number of motion primitives in the lattice to ensure strong performance during motion planning. We show that this problem is optimally solved by applying a separation principle: First, we find the best estimate of the user cost function given data, then an optimal control set is computed given that estimate. We evaluate our work in simulations for an autonomous robot in a 4-dimensional spatio-temporal lattice and show that the proposed approach is suitable to replicate the demonstrated behaviour while enjoying substantially increased performance. Keywords: Robot Motion Planning, Human-Robot Interaction
Comments
-
 4 года назад
4 года назад
-
 5 лет назад
5 лет назад
-
 4 года назад
4 года назад
-
 12 дней назад
12 дней назад
-
 4 года назад
4 года назад
-
 9 дней назад
9 дней назад
-
 2 недели назад
2 недели назад
-
 Трансляция закончилась 23 часа назад
Трансляция закончилась 23 часа назад
-
![1. CS50 на русском: Лекция #1 [Гарвард, Основы программирования, осень 2015 год]](https://imager.clipsaver.ru/SW_UCzFO7X0/max.jpg) 9 лет назад
9 лет назад
-
 1 год назад
1 год назад
-
 2 дня назад
2 дня назад
-
 6 дней назад
6 дней назад
-
 4 года назад
4 года назад
-
 2 недели назад
2 недели назад
-
 6 дней назад
6 дней назад
-
 1 день назад
1 день назад
-
 Трансляция закончилась 9 дней назад
Трансляция закончилась 9 дней назад
-
 1 год назад
1 год назад
-
 2 недели назад
2 недели назад
-
 1 год назад
1 год назад