Target Following for Unmanned Surface Vehicle (USV) Operating in Cluttered Environments скачать в хорошем качестве
Target Following for Unmanned Surface Vehicle (USV) Operating in Cluttered Environments
13 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Target Following for Unmanned Surface Vehicle (USV) Operating in Cluttered Environments в качестве 4k
У нас вы можете посмотреть бесплатно Target Following for Unmanned Surface Vehicle (USV) Operating in Cluttered Environments или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Target Following for Unmanned Surface Vehicle (USV) Operating in Cluttered Environments в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Target Following for Unmanned Surface Vehicle (USV) Operating in Cluttered Environments
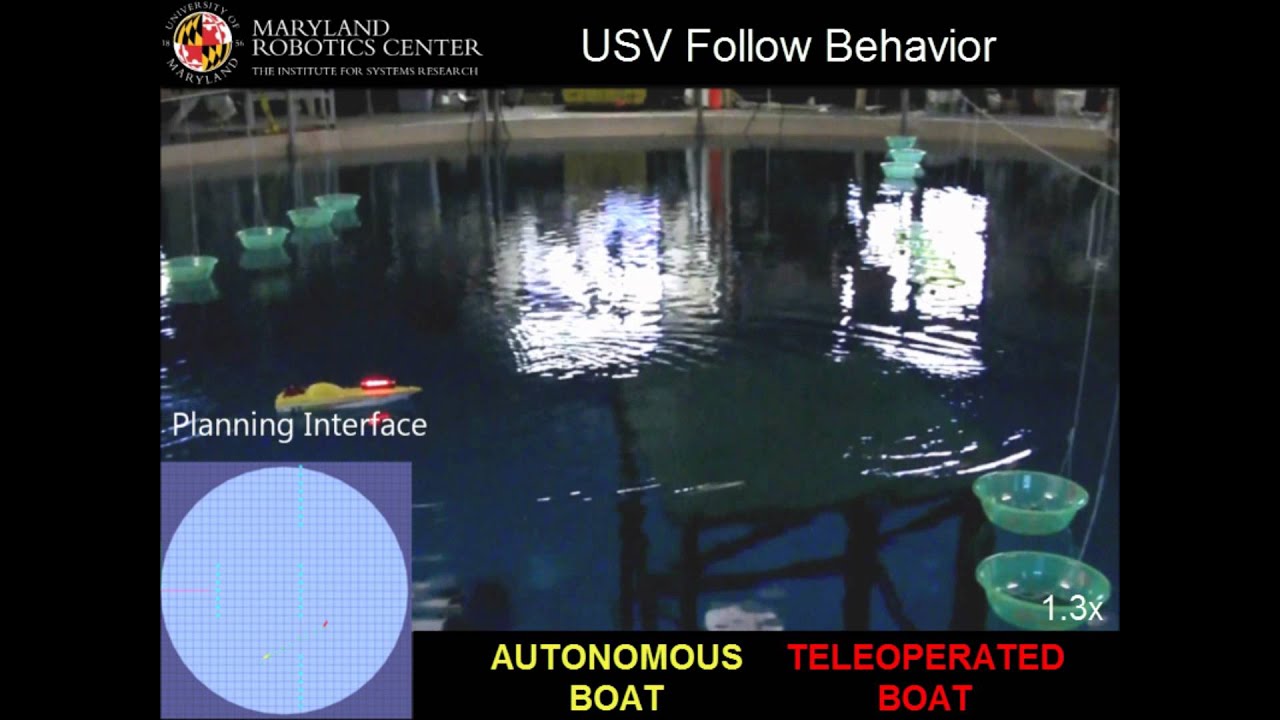
The capability of following a moving target in an environment with obstacles is required as a basic and necessary function for realizing an autonomous unmanned surface vehicle (USV). Many target following scenarios involve follower and target vehicles with different physical capabilities. Moreover, the follower vehicle may not have prior information about the intended motion of the target boat. We have developed a novel approach for integrating motion goal prediction, trajectory planning, and trajectory tracking components to realize the capability of following through a close interplay of planning and control. Integrating these three components required adding new capabilities to each component to make them mutually compatible. The developed motion goal prediction algorithm enables computation of a suitable motion goal for the USV in the close vicinity to the target boat based on its motion, current state, as well as distribution of obstacles. The trajectory planner generates a dynamically feasible, collision-free trajectory to allow the USV safely reach the desired motion goal. Due to the scenario involving moving target, the trajectory planning needs to be sufficiently fast and yet produce dynamically feasible and short trajectories. To meet these challenges, the trajectory planner searches for trajectories through a hybrid, pose-position state space using a multi-resolution control action set. The underlying trajectory tracking controller computes desired surge speed for each segment of the trajectory and ensures that the vehicle maintains it. This video shows an autonomous USV following a teleoperated boat in a tank positioned inside the Neutral Buoyancy Research Facility (NBRF) at the University of Maryland. In this video, we do not demonstrate the motion goal prediction capability due to space constraints. Authors: Petr Svec, Atul Thakur, Eric Raboin, Brual C. Shah, and Satyandra K. Gupta. A conference paper [Svec et al., 2012] can be found at http://terpconnect.umd.edu/~skgupta/P... OR http://terpconnect.umd.edu/~petrsvec/.... A journal paper describing the follow capability with motion prediction in more detail will be available soon. The Maryland Robotics Center is an interdisciplinary research center housed in the Institute for Systems Research (link is external) within the A. James Clark School of Engineering (link is external). The mission of the center is to advance robotic systems, underlying component technologies, and applications of robotics through research and educational programs that are interdisciplinary in nature and based on a systems approach. https://robotics.umd.edu
Comments



















