Robotic Arm with Tinkercad скачать в хорошем качестве
Robotic Arm with Tinkercad
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Robotic Arm with Tinkercad в качестве 4k
У нас вы можете посмотреть бесплатно Robotic Arm with Tinkercad или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Robotic Arm with Tinkercad в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Robotic Arm with Tinkercad
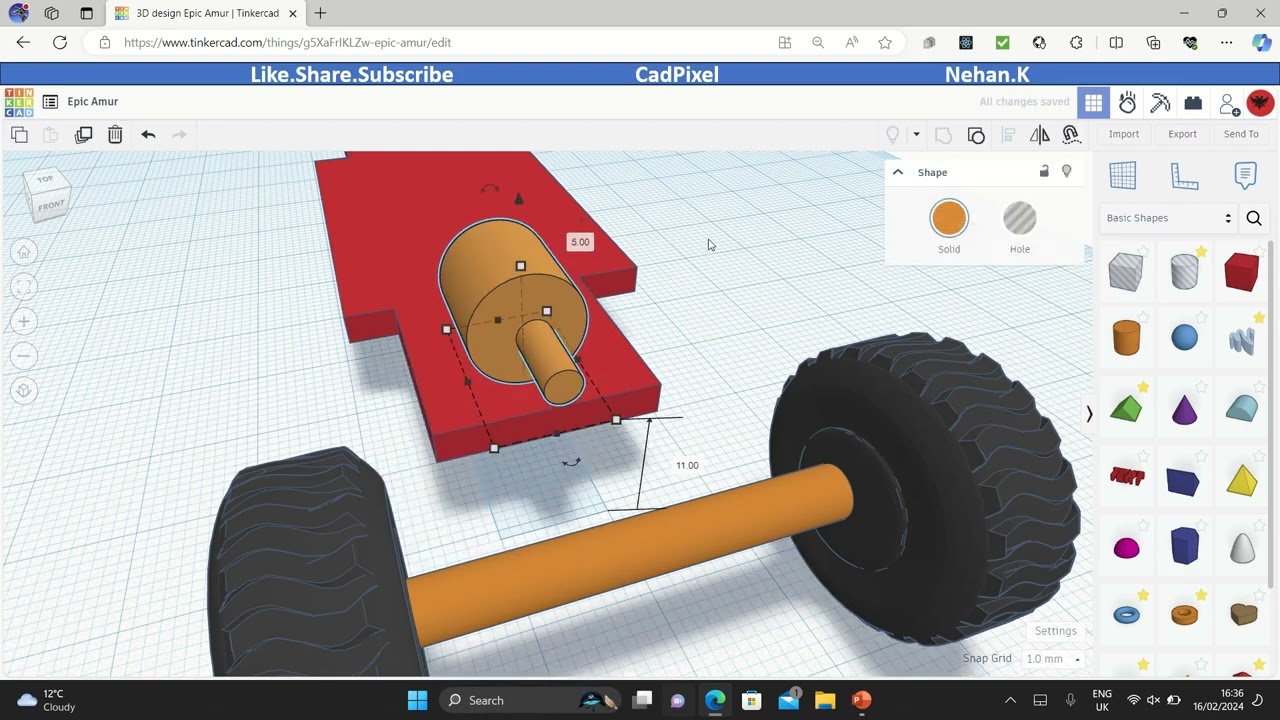
https://cadpixel.com/ I am going to design a robotic arm with tinkercad I am 11 yr school kid from Birmingham UK as of 2024 , am passionate about CAD designs and learnt tinkercad and enjoy designing in tinkercad or ther vad tools like freecad , onshape, fusion360 many designs if you like this please do comment and share like gives me more motivation to produce more vids like this and I can also learn more If you are a cad expert please do suggest ideas how I can improve my CAD skills more since my school is not advanced enough to teach me this stuff Designing a robotic arm using Tinkercad can be a fun and educational project. Here’s a simple guide to get you started: Steps to Design a Simple Robotic Arm in Tinkercad 1. Create the Base Step 1: Open Tinkercad and start a new project. Step 2: Drag and drop basic shapes like cubes or cylinders to create the base of your robotic arm. Arrange them to form a stable platform. 2. Design the Arm Segments Step 3: Use more shapes (e.g., cylinders, boxes) to design the segments of the robotic arm. Each segment represents a joint that can rotate. Step 4: Align and connect these segments using Tinkercad’s snap and align tools to ensure they fit together smoothly. 3. Add Joints and Rotation Step 5: Incorporate cylindrical shapes as joints between the segments. These will allow the segments to rotate relative to each other. Step 6: Use Tinkercad’s group and align tools to combine the joints with the segments, ensuring they rotate correctly. 4. Attach Gripper or End Effector Step 7: Design a gripper or end effector at the end of the robotic arm using basic shapes or custom designs. Step 8: Align and attach the gripper securely to the last segment of the arm. 5. Refine and Test Step 9: Review your design in Tinkercad’s 3D view. Adjust sizes, positions, and connections as needed. Step 10: Simulate the movement of the robotic arm by rotating the joint parts to ensure they move smoothly and without interference. 6. Final Touches and Export Step 11: Add any additional features or details to enhance your design. Step 12: Once satisfied, export your design from Tinkercad in a format compatible with 3D printing or further CAD software. Tips for Designing in Tinkercad: Use Grouping: Grouping shapes helps maintain organization and makes it easier to manipulate parts of the robotic arm. Experiment with Shapes: Tinkercad offers a variety of shapes and tools for customization. Don’t hesitate to experiment with different shapes and sizes to achieve the desired look and functionality. Explore Tinkercad’s Community: Check out designs and tutorials from the Tinkercad community for inspiration and additional tips on designing robotic arms and other projects. By following these steps, you can create a simple yet functional robotic arm design using Tinkercad. This project not only introduces you to 3D modeling and design principles but also allows you to explore the basics of robotics and mechanical engineering concepts in a hands-on manner. #cad #studentproject #tinkercad #CAD #Tinkercad #3Ddesign #ProductDesign, #3Dprinting #MakerMovement #Engineering #DIY #DesignThinking #STEMeducation
Comments








![[1DAY_1CAD] ROBOT HAND - SIM LAB (Tinkercad : Design / Project / Education)](https://imager.clipsaver.ru/2SoULCoE1Yk/max.jpg)