Hexapteron - The simplest six-DOF parallel robot скачать в хорошем качестве
Hexapteron - The simplest six-DOF parallel robot
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Hexapteron - The simplest six-DOF parallel robot в качестве 4k
У нас вы можете посмотреть бесплатно Hexapteron - The simplest six-DOF parallel robot или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Hexapteron - The simplest six-DOF parallel robot в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Hexapteron - The simplest six-DOF parallel robot
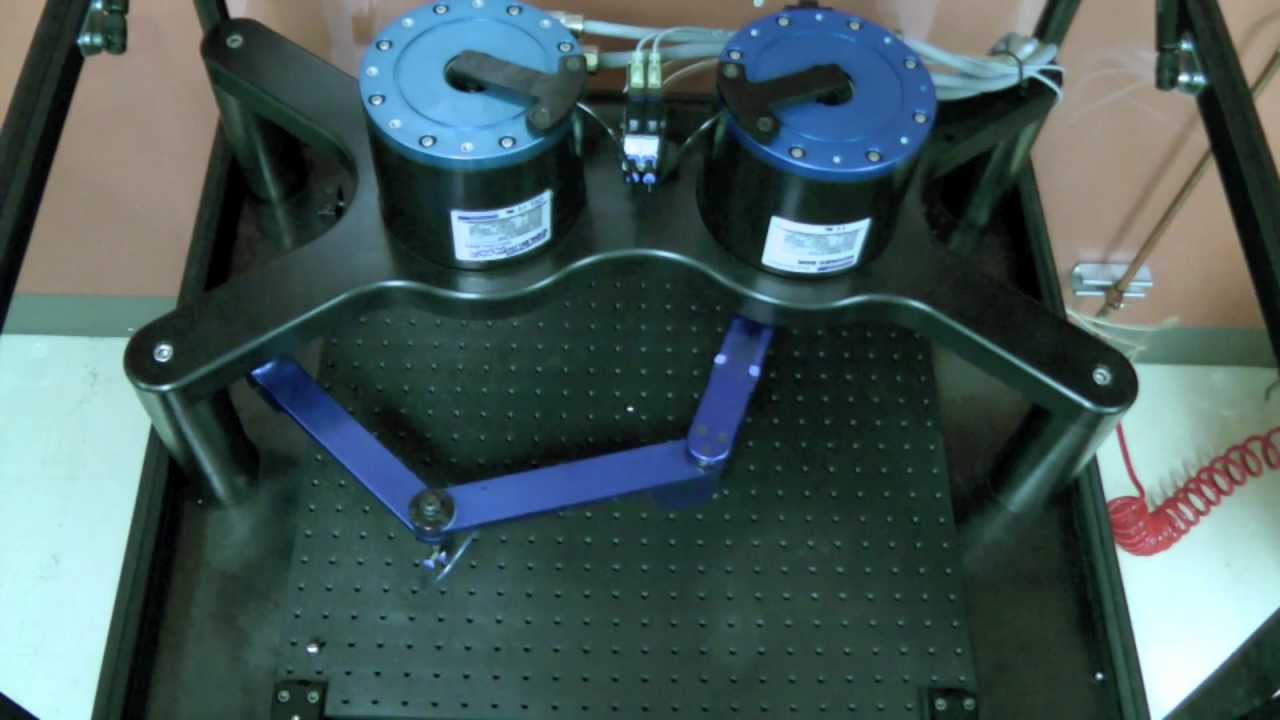
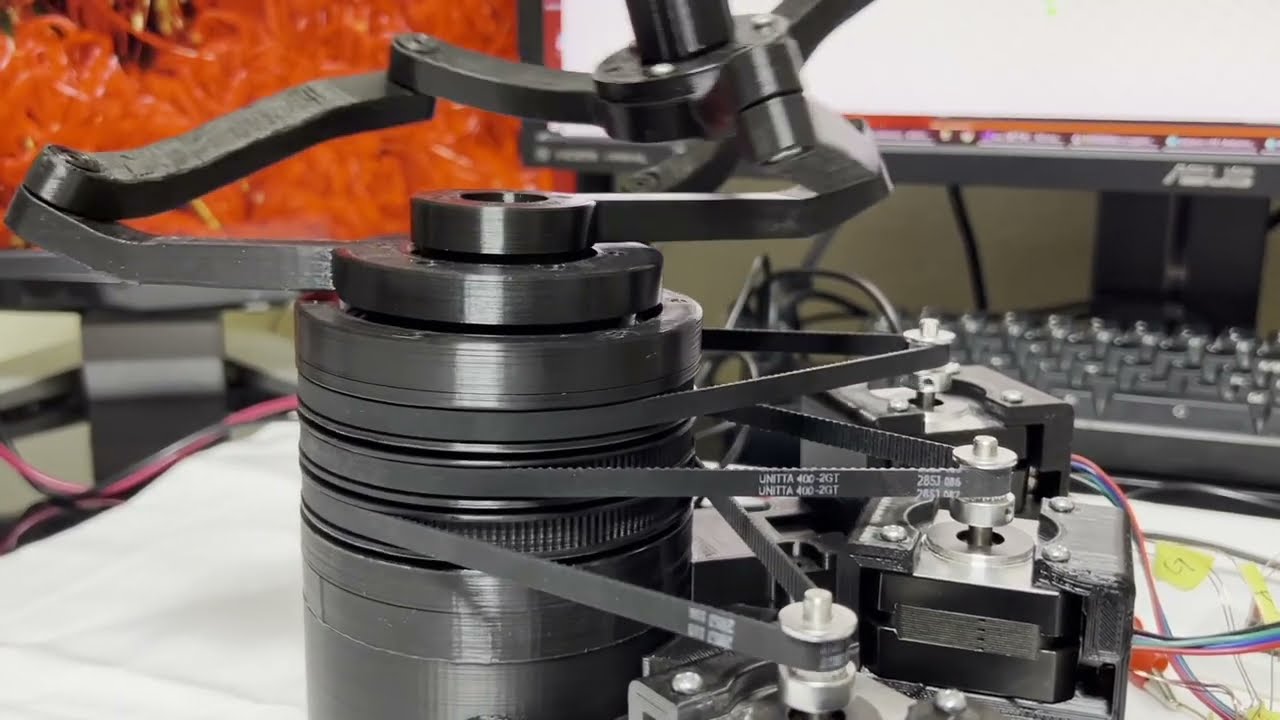
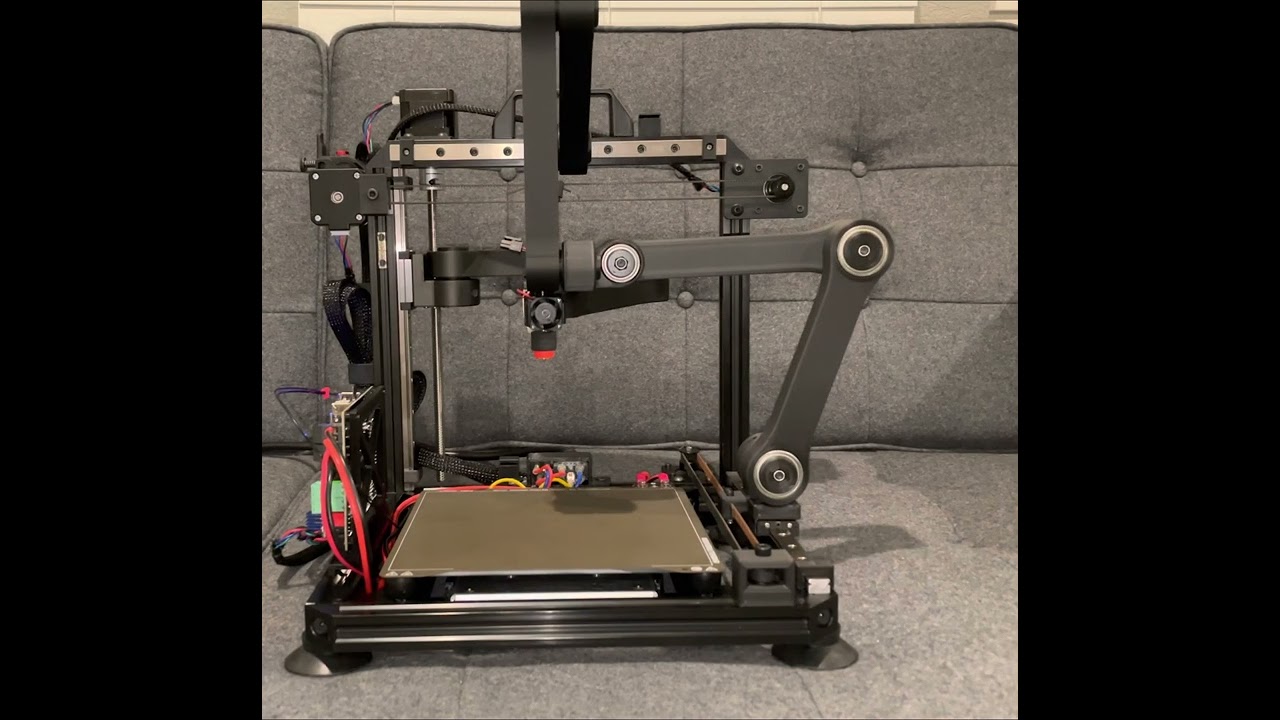
This video shows the very first movements of the Hexapteron, a unique six-Degree-of-Freedom (6-DOF) parallel robot with trivial inverse and direct kinematics. There's still a lot of work left.. The Hexapteron was invented by @NicholasSeward and its kinematic model was described for the first time in: Seward, N., and Bonev, I.A., "A new 6-DOF parallel robot with simple kinematic model", 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China, May 31 – June 5, 2014. What's unique about the Hexapteron is its kinematics: both its direct and inverse kinematic models have a single solution that is trivial to calculate. That's unseen for a 6-DOF parallel robot with six identical legs and no double or triple spherical joints. Most parallel robots have simple inverse kinematics but extremely complex direct kinematics. For example, the popular telescoping-strut hexapod can have up to 40 different real solutions to its direct kinematic problem. The mechanical design of the Hexapteron prototype was made by @echerchelanov as part of his Ph.D. thesis at the ÉTS. The robot controller was designed by François Vadnais, technician at the ÉTS. The controller and the robot motors are from @BeckhoffAutomation. The robot was machined and assembled at the ÉTS. Lastly, programing was done by a team of four undergraduate students at the ÉTS, as part of their single-semester capstone project.
Comments