Vision-Language-Action Model & Diffusion Policy Switching Enables Dexterous Control of an Robot Hand скачать в хорошем качестве
Vision-Language-Action Model & Diffusion Policy Switching Enables Dexterous Control of an Robot Hand
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Vision-Language-Action Model & Diffusion Policy Switching Enables Dexterous Control of an Robot Hand в качестве 4k
У нас вы можете посмотреть бесплатно Vision-Language-Action Model & Diffusion Policy Switching Enables Dexterous Control of an Robot Hand или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Vision-Language-Action Model & Diffusion Policy Switching Enables Dexterous Control of an Robot Hand в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
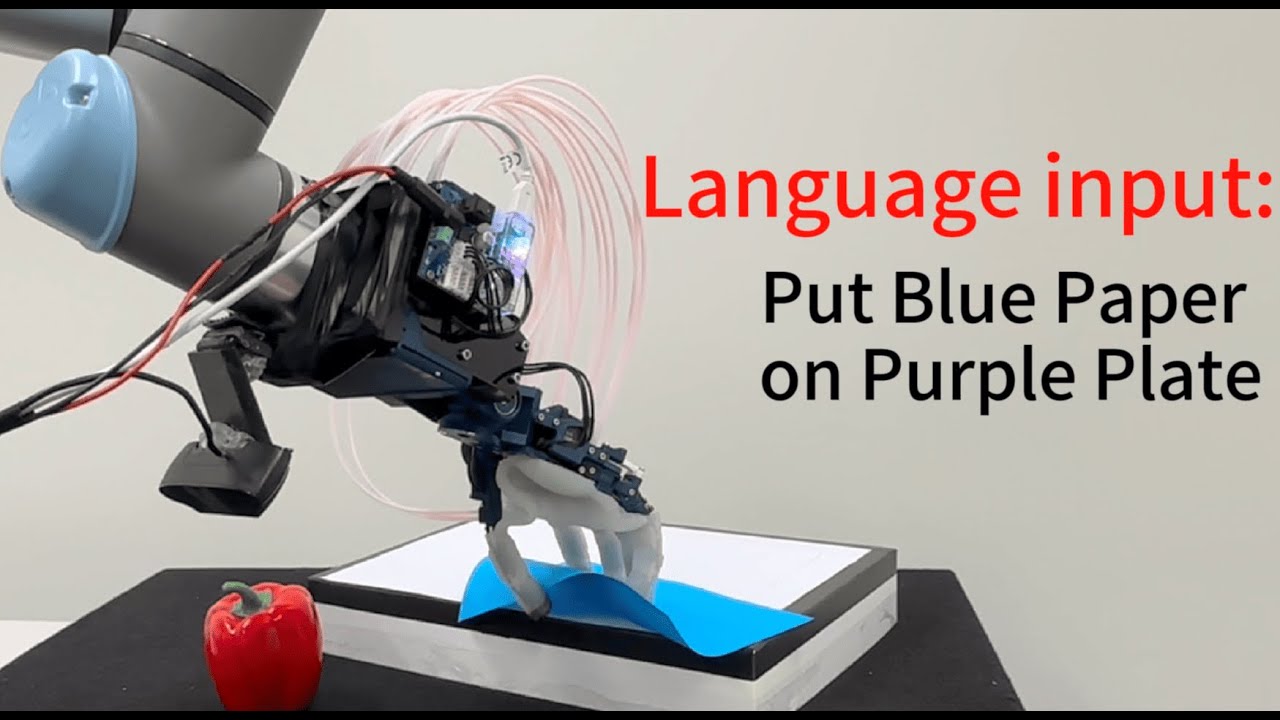
Vision-Language-Action Model & Diffusion Policy Switching Enables Dexterous Control of an Robot Hand
check our paper: http://arxiv.org/abs/2410.14022 website: https://vla-diffu-switch.github.io/ To advance autonomous dexterous manipulation, we propose a hybrid control method that combines the relative advantages of a fine-tuned Vision-Language-Action (VLA) model and diffusion models. The VLA model provides language commanded high-level planning, which is highly generalizable, while the diffusion model handles low-level interactions which offers the precision and robustness required for specific objects and environments. By incorporating a switching signal into the training-data, we enable event based transitions between these two models for a pick-and-place task where the target object and placement location is commanded through language. This approach is deployed on our anthropomorphic ADAPT Hand 2, a 13DoF robotic hand, which incorporates compliance through series elastic actuation allowing for resilience for any interactions: showing the first use of a multi-fingered hand controlled with a VLA model. We demonstrate this model switching approach results in a over 80% success rate compared to under 40% when only using a VLA model, enabled by accurate near-object arm motion by the VLA model and a multi-modal grasping motion with error recovery abilities from the diffusion model.
Comments




![[RSS 2024] MOKA: Open-World Robotic Manipulation through Mark-Based Visual Prompting](https://imager.clipsaver.ru/L571UpVYenE/max.jpg)


![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://imager.clipsaver.ru/X3uZq2joiW8/max.jpg)