Locally Active Globally Stable Dynamical Systems: Experiments on KUKA LWR for Writing Tasks скачать в хорошем качестве
Locally Active Globally Stable Dynamical Systems: Experiments on KUKA LWR for Writing Tasks
6 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Locally Active Globally Stable Dynamical Systems: Experiments on KUKA LWR for Writing Tasks в качестве 4k
У нас вы можете посмотреть бесплатно Locally Active Globally Stable Dynamical Systems: Experiments on KUKA LWR for Writing Tasks или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Locally Active Globally Stable Dynamical Systems: Experiments on KUKA LWR for Writing Tasks в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Locally Active Globally Stable Dynamical Systems: Experiments on KUKA LWR for Writing Tasks
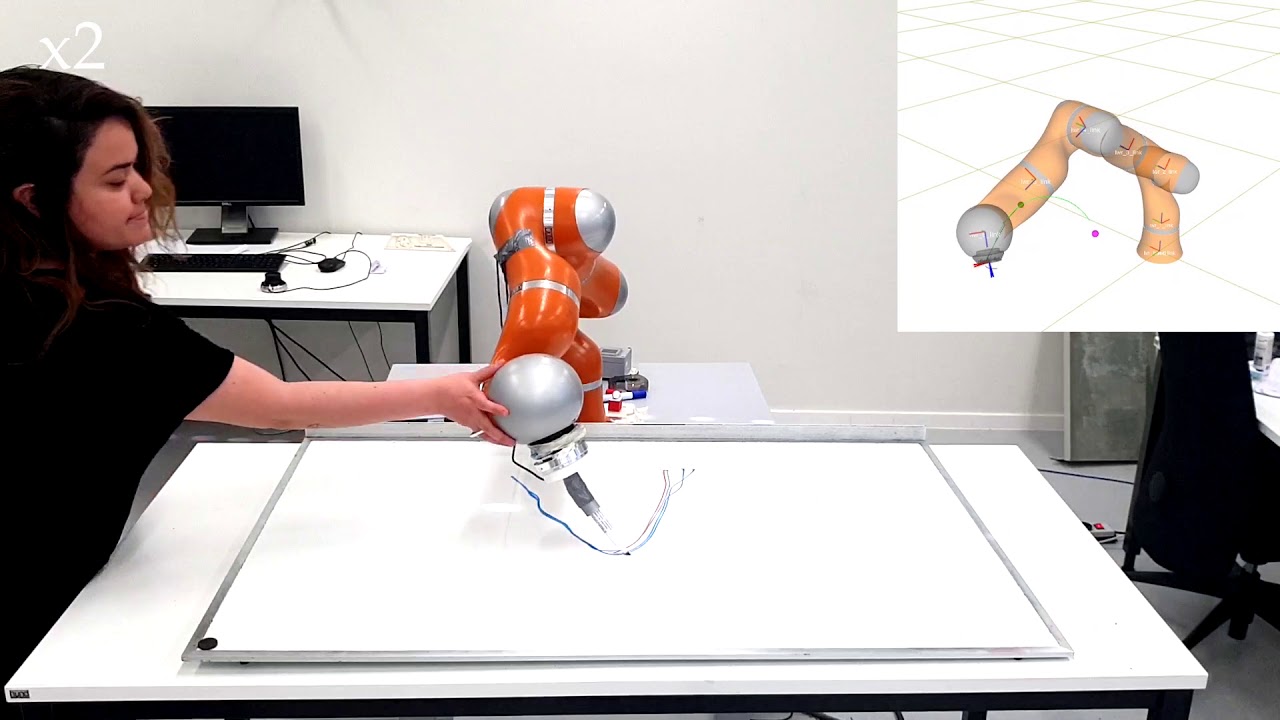
Supplementary video for the following paper submitted to IJRR: "Locally Active Globally Stable Dynamical Systems: Theory, Learning and Experiments" Abstract: State-dependent Dynamical Systems (DS) offer adaptivity, reactivity and robustness to perturbations in motion planning and physical human-robot interaction tasks. Learning DS-based motion representations from non-linear reference trajectories is an active research area in robotics. Most approaches focus on learning DS that can (i) accurately mimic the demonstrated motion, while (ii) ensuring convergence to the target; i.e. they are globally asymptotically (or exponentially) stable. When the objective of a task is to reach a target while tracking a reference trajectory, if perturbations are present a compliant robot guided with a DS will ultimately reach the target, albeit failing to track the reference trajectory. In this work, we propose a novel DS formulation referred to as the locally active globally stable DS (LAGS-DS). The LAGS-DS provides both global convergence and stiffness-like symmetric attraction behaviors around a reference-trajectory in regions of the state-space where trajectory tracking is important. This allows for a unified approach towards motion and impedance encoding in a single motion model without parameterizing the controller of the robot; i.e. stiffness is embedded in the motion model. To learn LAGS-DS from demonstrations we propose a learning strategy based on Bayesian non-parametric Gaussian mixture models, Gaussian processes and a sequence of constrained optimization problems that ensure estimation of stable DS parameters via Lyapunov theory. This novel DS and learning scheme is extensively validated on writing tasks with a KUKA LWR manipulator, as well as navigation and co-manipulation scenarios with iCub humanoid robots. Contact: Nadia Figueroa [https://nbfigueroa.github.io/] Funding: Cogimon [https://cogimon.eu/]
Comments















![Как сжимаются изображения? [46 МБ ↘↘ 4,07 МБ] JPEG в деталях](https://imager.clipsaver.ru/Kv1Hiv3ox8I/max.jpg)


