Harbour Distance: Result of connecting Airsim + ROS + PX4 + QGC скачать в хорошем качестве
Harbour Distance: Result of connecting Airsim + ROS + PX4 + QGC
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Harbour Distance: Result of connecting Airsim + ROS + PX4 + QGC в качестве 4k
У нас вы можете посмотреть бесплатно Harbour Distance: Result of connecting Airsim + ROS + PX4 + QGC или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Harbour Distance: Result of connecting Airsim + ROS + PX4 + QGC в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
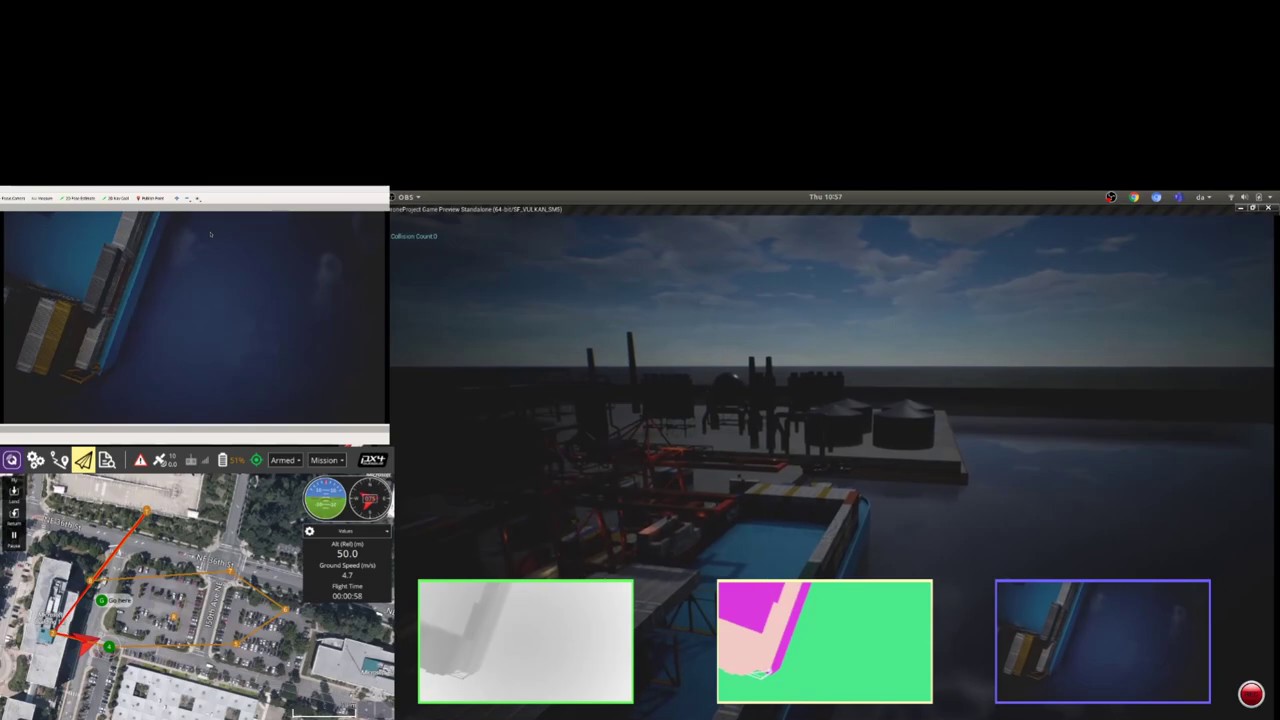
Harbour Distance: Result of connecting Airsim + ROS + PX4 + QGC
Currently, we are using QGroundControl to plan a route for the drone, this is only temporary and will be replaced by either the AirSim API or preferred MAVROS interface connected directly to the PX4. The images published in ROS are published in a rather low frequency. This is due to my limited hardware capability and will be improved when freezing the engine rendering. But for this demonstration purpose, I have left everything on. Music was not intended, so I do not own any of this but could not be bothered removing it, if it gets taken down then I will be removing it and reupload. ____________ Airsim: https://github.com/microsoft/AirSim ROS_wrapper: https://github.com/microsoft/AirSim/b... QGroundControl: http://qgroundcontrol.com/ PX4 sitl: https://dev.px4.io/v1.9.0/en/simulation/
Comments



















