Betaflight: Aprendendo a ajustar PIDs no seu Mini Drone Racer скачать в хорошем качестве
Betaflight: Aprendendo a ajustar PIDs no seu Mini Drone Racer
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Betaflight: Aprendendo a ajustar PIDs no seu Mini Drone Racer в качестве 4k
У нас вы можете посмотреть бесплатно Betaflight: Aprendendo a ajustar PIDs no seu Mini Drone Racer или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Betaflight: Aprendendo a ajustar PIDs no seu Mini Drone Racer в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Betaflight: Aprendendo a ajustar PIDs no seu Mini Drone Racer
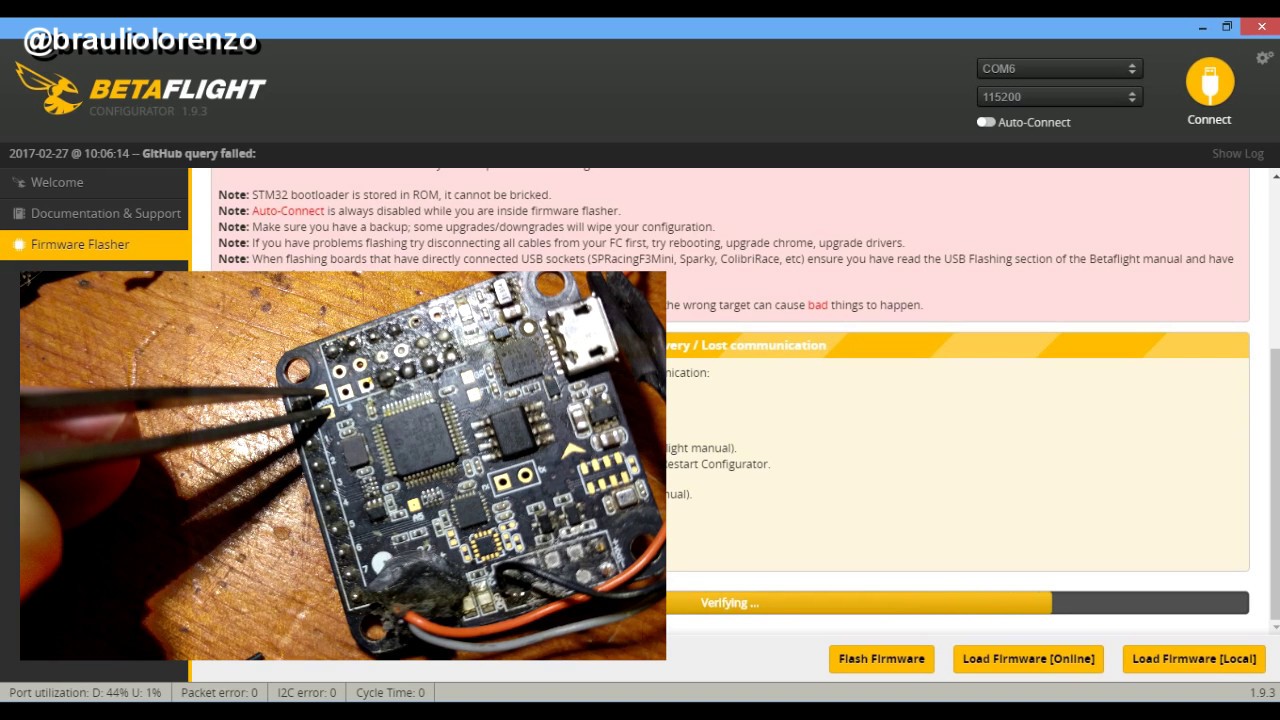
Fiz esse tutorial para ajudar a todos como regular corretamente seus PIDs. Peguei um drone com PID Padrão da Betaflight 3.1.5 e fui ajustando.Vôos de antes e depois dos ajustes, vejam a diferença! Quaisquer dúvidas, comentem abaixo! Tutorial converter CC3D para Cleanflight: • Tutorial: Convertendo cc3d para cleanflight Tutorial configurar ESC BLHeli: • Aprendendo a usar o BLHeli Suite Tutorial aprendendo CleanFlight: • Aprendendo a configurar o Cleanflight Link para instalar betaflight: https://chrome.google.com/webstore/de... Link para instalar BlHeli Suite: https://blhelisuite.wordpress.com/ 1:52 Voando com PID Padrão da BetaFlight 3.1.5 3:18 Iniciando configuração dos PIDs 3:57 Voando e explicando P do roll baixo 5:06 Voando e explicando P do roll alto 6:07 Ajustando e entendendo o P do roll 7:14 Ajustando e entendendo o D do roll 8:18 Ajustando e entendendo o P do pitch 8:51 Ajustando e entendendo o D do pitch 9:45 Ajustando um pouco mais o D do roll 11:27 Voando e explicando o D do roll baixo 12:05 Voando e explicando o D do roll alto 12:58 Voando e explicando o P do yaw alto 15:06 Voando e explicando o P do yaw baixo 15:48 Ajustando e entendendo o P do yaw 16:58 Ajustando e entendendo o I (roll e pitch) 17:12 Voando e explicando o I do roll e pitch altos 18:01 Voando e explicando o I do roll e pitch baixos 19:42 Explicando os números dos PIDs 21:30 Explicando o ajuste de TPA e TPA Breakpoint 22:38 Voando e explicando TPA alto 25:19 Voando com PIDs ajustados na BetaFlight 3.1.5 28:39 Aumentando o TPA para eliminar vibrações com Full Motor 30:06 Considerações finais de ajustes de PIDs
Comments