My LeRobot Hackathon submission (Part 7) - Adventures with Johnny the humanoid скачать в хорошем качестве
My LeRobot Hackathon submission (Part 7) - Adventures with Johnny the humanoid
9 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: My LeRobot Hackathon submission (Part 7) - Adventures with Johnny the humanoid в качестве 4k
У нас вы можете посмотреть бесплатно My LeRobot Hackathon submission (Part 7) - Adventures with Johnny the humanoid или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон My LeRobot Hackathon submission (Part 7) - Adventures with Johnny the humanoid в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
My LeRobot Hackathon submission (Part 7) - Adventures with Johnny the humanoid
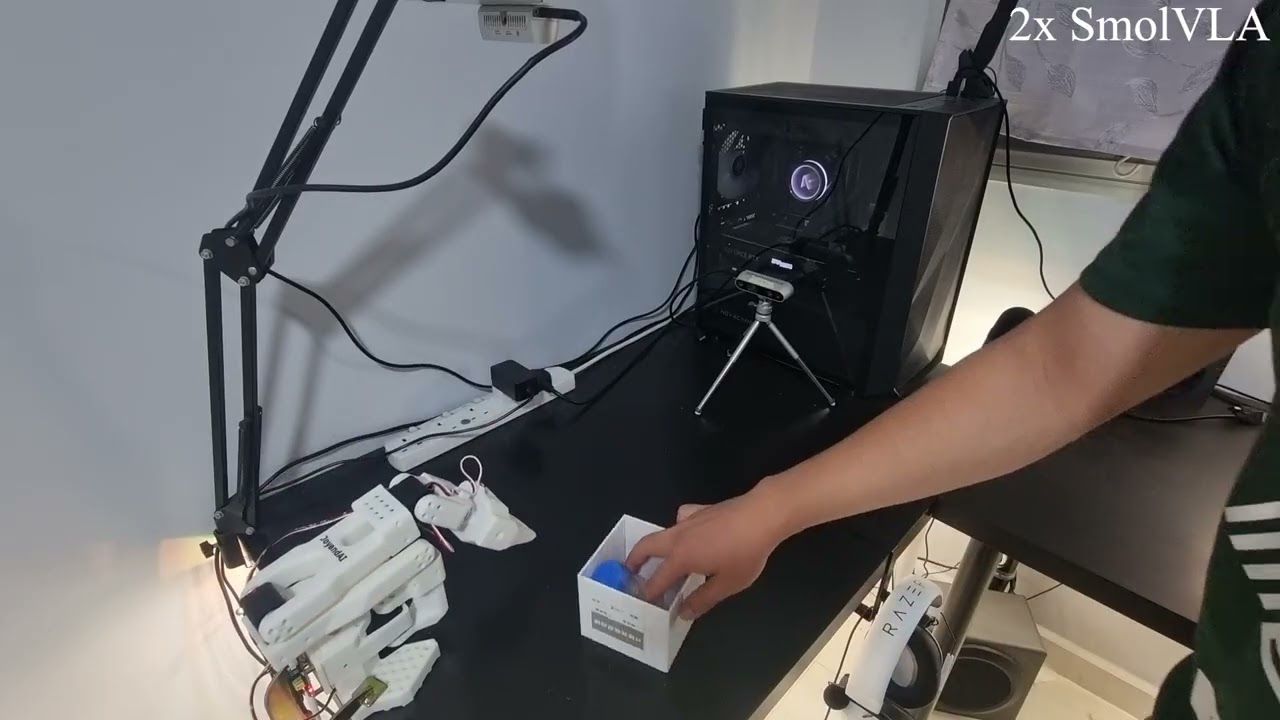
Took part in hugging face's worldwide hackathon. Co-organised Berlin's local version in Motionlab (Bearcover's office) and got a good crowd to come down. Here is my submission. As usual, I'm sock picking. The socks must be picked. This is the hill I die on. https://huggingface.co/LeRobot-worldw... Built the SO-101 arm 2 days before, broke a 12V servo, rebuilt the entire arm with 6V feetech servos (luckily had those from months ago but never used) . Only got teleoperation working 2 days before then. For Task 1 sock picking (and immediately drop repeatedly): To prove the concept. That socks can be picked with imitation learning. That was with 20k steps with ACT using lerobot. Got it all working within a few hours. Only 1 camera. 4 demonstrations but with 10+ picks in each. Task 2 "Socks into box": 40k steps with 100 demonstrations each with 2-4 socks each, tried to get many positions. ACT. Brought cable for gripper motor camera and therefore . 101 demonstrations. Tried recently released smolVLA but training was slow and I couldn't get eval working in time. I still regret every day not buying a laptop with a NVIDIA GPU, I have AMD radeon. So I was using lightning.ai A10G GPU and free credits there for training. And luckily ACT and SmolVLA works on CPU for inference, and smolVLA soon for remote inference. Thanks to huggingface and lerobot for organising and motionlab & Bearcover for allowing the use of the space. And I know what you're asking, no, I hate bears obviously. Struggled for a few months with classical approaches for "socks in box" with Johnny so probably best to pivot more into robot learning. No Johnny or humanoids in this video but 1 arm leads to 2 arms (bi-manual) + teleoperation, foundation models and imitation learning are all relevant for humanoids. Full playlist of "Adventures with Johnny the humanoid" here: • Adventures with Johnny the humanoid Recorded on: June 15th 2025 Subscriber count: 78
Comments



![Best of Deep House [2026] | Melodic House & Progressive Flow](https://imager.clipsaver.ru/Il-ZpBuC8tA/max.jpg)