Visualize Multimodal Sensor Data: A Gentle Introduction to Rerun (Part 4) скачать в хорошем качестве
Visualize Multimodal Sensor Data: A Gentle Introduction to Rerun (Part 4)
3 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Visualize Multimodal Sensor Data: A Gentle Introduction to Rerun (Part 4) в качестве 4k
У нас вы можете посмотреть бесплатно Visualize Multimodal Sensor Data: A Gentle Introduction to Rerun (Part 4) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Visualize Multimodal Sensor Data: A Gentle Introduction to Rerun (Part 4) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Visualize Multimodal Sensor Data: A Gentle Introduction to Rerun (Part 4)
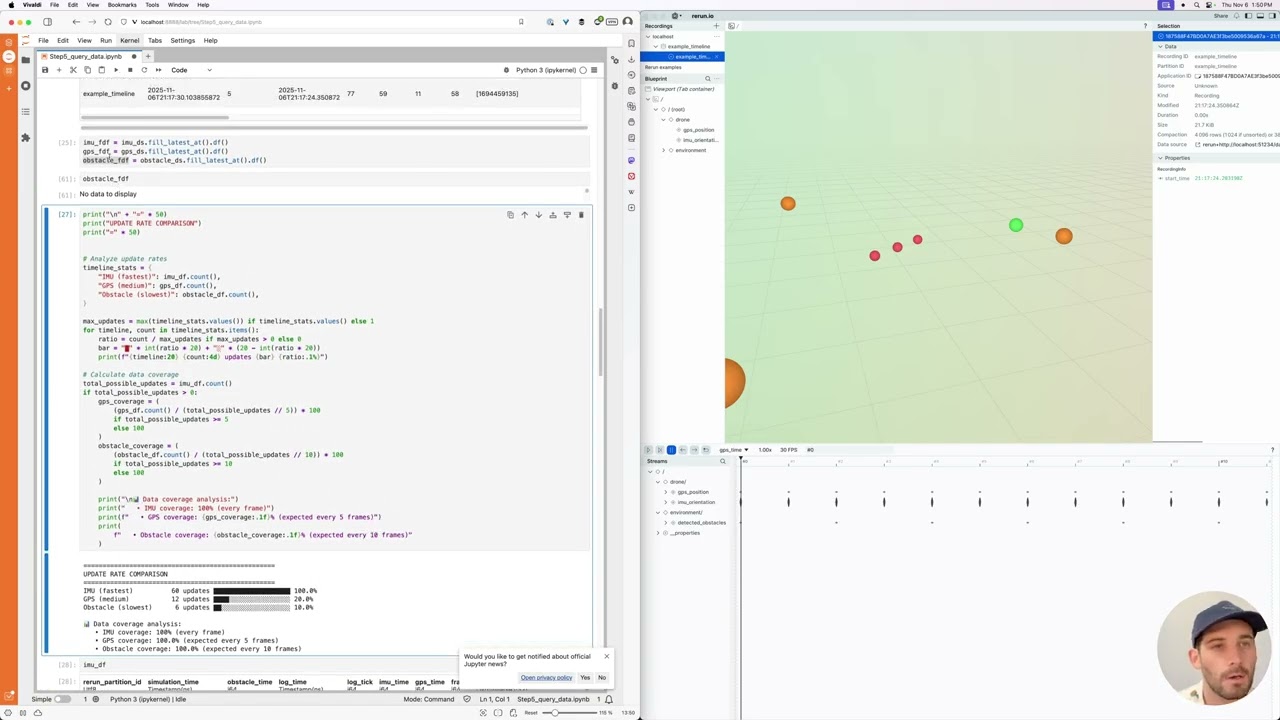
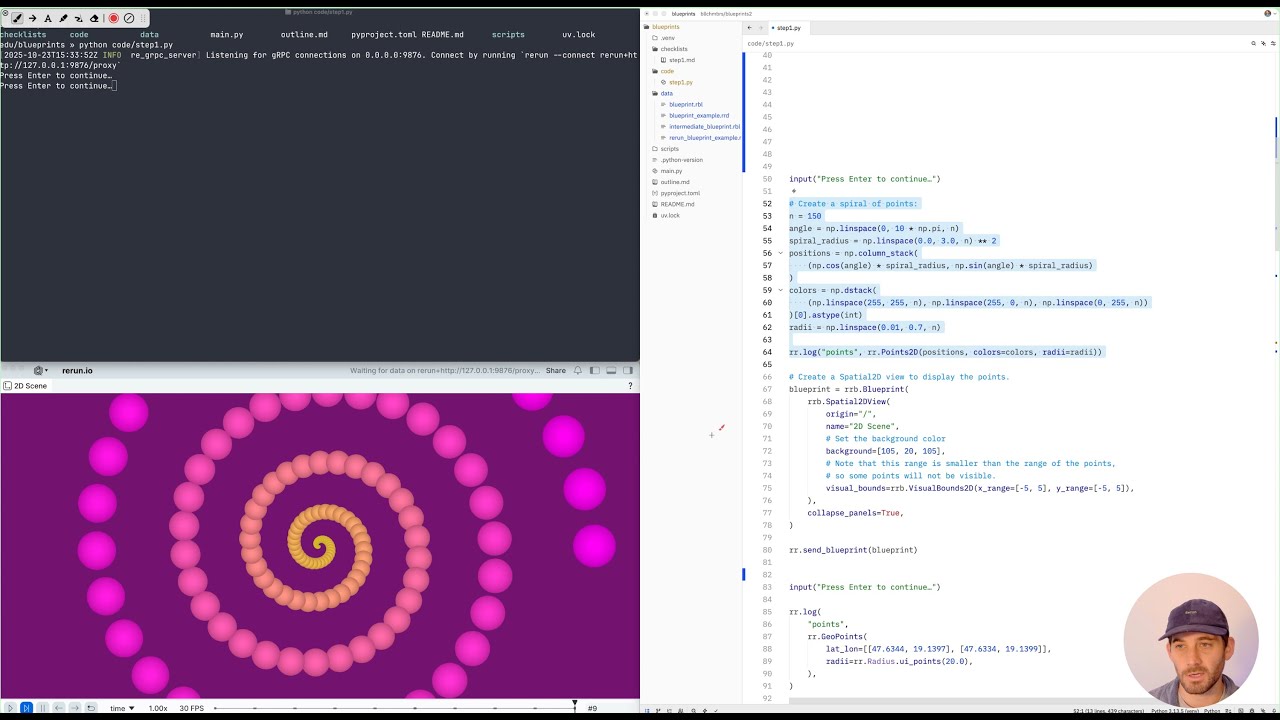
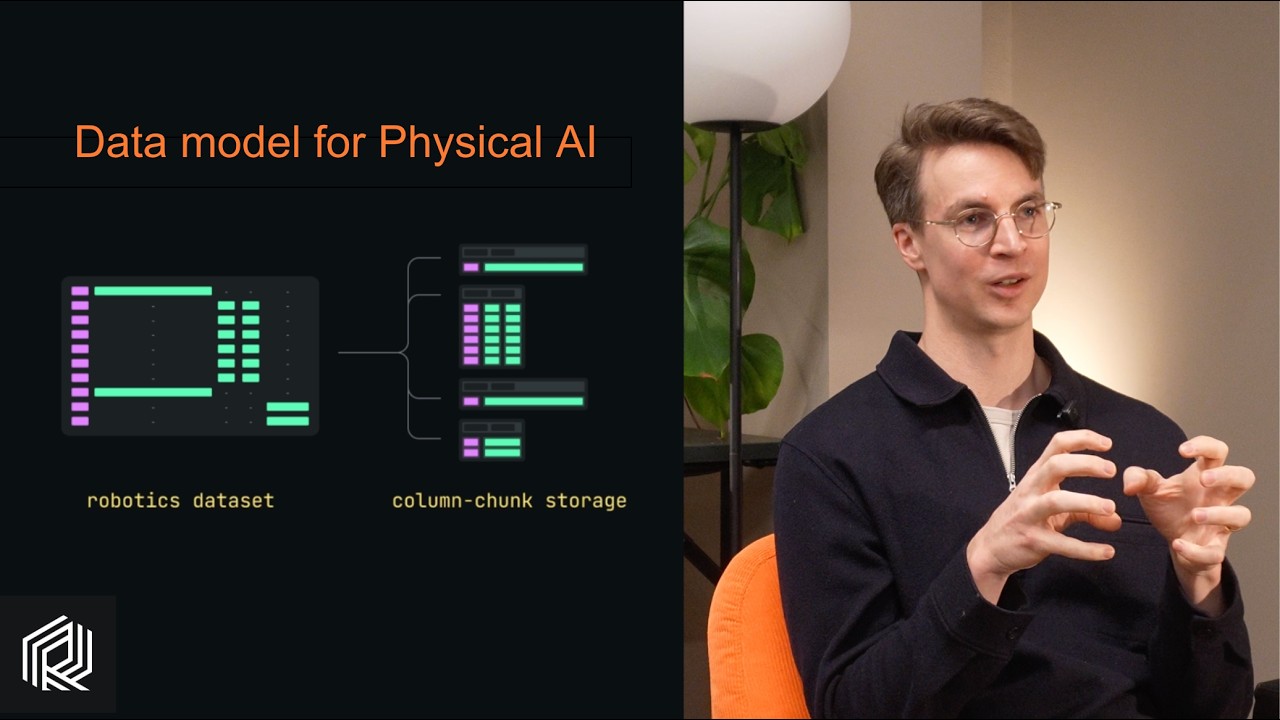
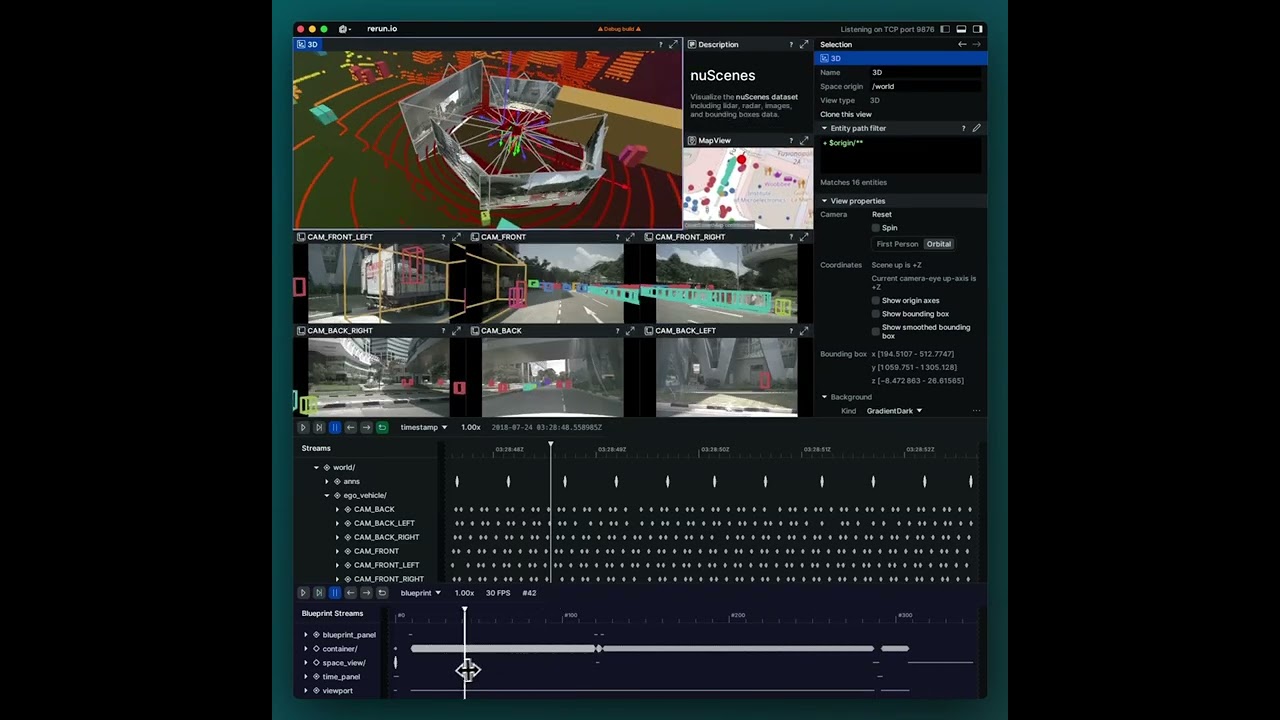
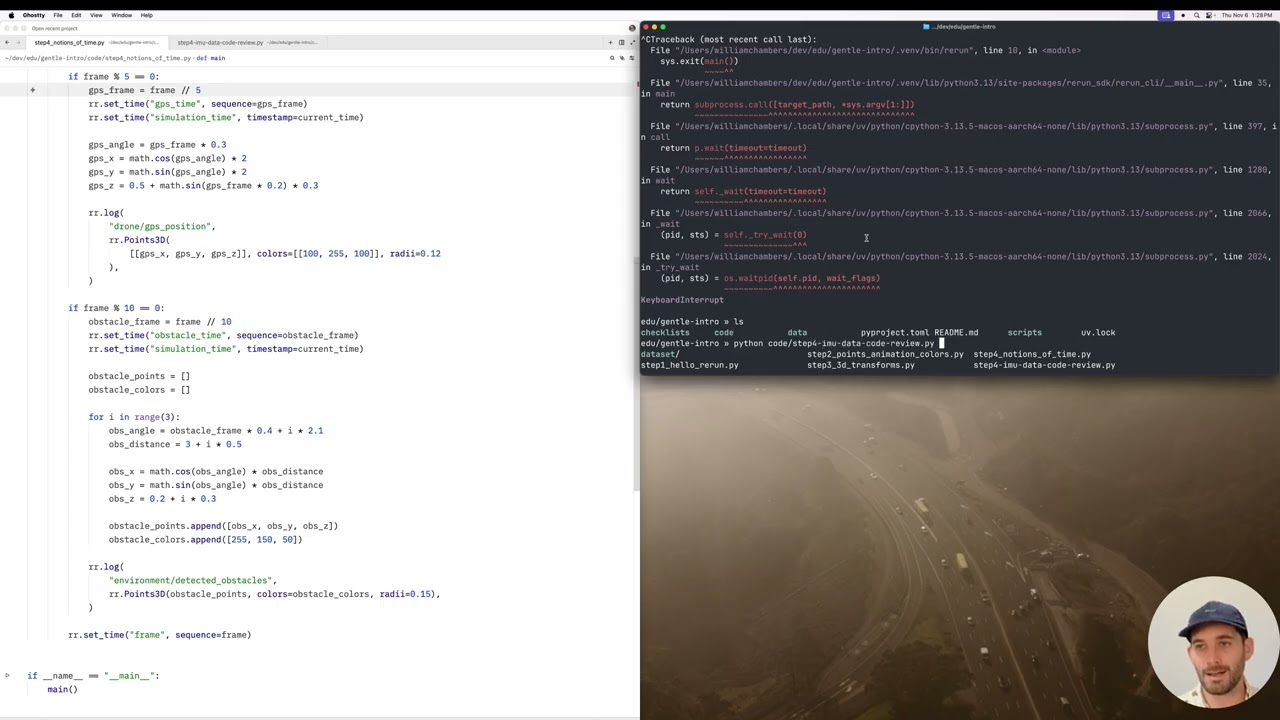
Learn how to handle asynchronous sensor streams in robotics applications using Rerun's flexible timeline system. This tutorial demonstrates how to visualize IMU, GPS, and camera data that update at different frequencies—a common challenge in robotics and autonomous systems. What You'll Build: You'll work through two examples: first, a synthetic animation showing how sensors with different update rates (IMU at 60Hz, GPS at 10Hz, obstacle detection at 5Hz) can be visualized on independent timelines. Then, we'll do a hands-on code review with real IMU sensor data, combining accelerometer readings, gyroscope measurements, and camera feeds with 3D transforms and pinhole camera models. You'll learn both row-wise and batch logging patterns using send_columns() for efficient time-series data ingestion, plus how to use static vs. time-varying properties for camera calibration and transforms. Technical Resources: GitHub Examples: https://github.com/rerun-io/rerun/tre... IMU Signals Example (runnable in viewer): https://rerun.io/examples Rerun Docs: https://rerun.io/docs/getting-started... API Reference: https://rerun.io/docs (Transform3D, Pinhole archetypes) Main Repo: https://github.com/rerun-io/rerun What You'll Learn: Custom timeline creation with sequences and timestamps Batch logging with Pandas DataFrames using send_columns() 3D transform hierarchies and pinhole camera models Handling asynchronous sensor streams (IMU, GPS, vision) Static vs. temporal properties for sensor calibration Try It Yourself: Download the IMU example from the Rerun viewer (Examples → IMU Signals) or grab the code from the examples repo. Works seamlessly with ROS/ROS2 bag files, MCAP recordings, and CSV sensor logs. Framework Compatibility: Rerun integrates with ROS, ROS2, PyTorch, TensorFlow, NumPy, and Pandas. Check the integration docs for your specific stack. Connect with the Community: Discord: / discord Twitter/X: https://x.com/rerundotio LinkedIn: / rerun-io Code: https://gist.github.com/bllchmbrs/057... This is Part 4 of the Gentle Introduction to Rerun series. After this video, you'll have the core skills to log, visualize, and understand multimodal robotics data with Rerun. Keywords: Rerun, computer vision, robotics, Physical AI, multimodal data, IMU visualization, sensor fusion, ROS2, MCAP, time-series visualization, 3D transforms, autonomous systems
Comments