Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot скачать в хорошем качестве
Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot в качестве 4k
У нас вы можете посмотреть бесплатно Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
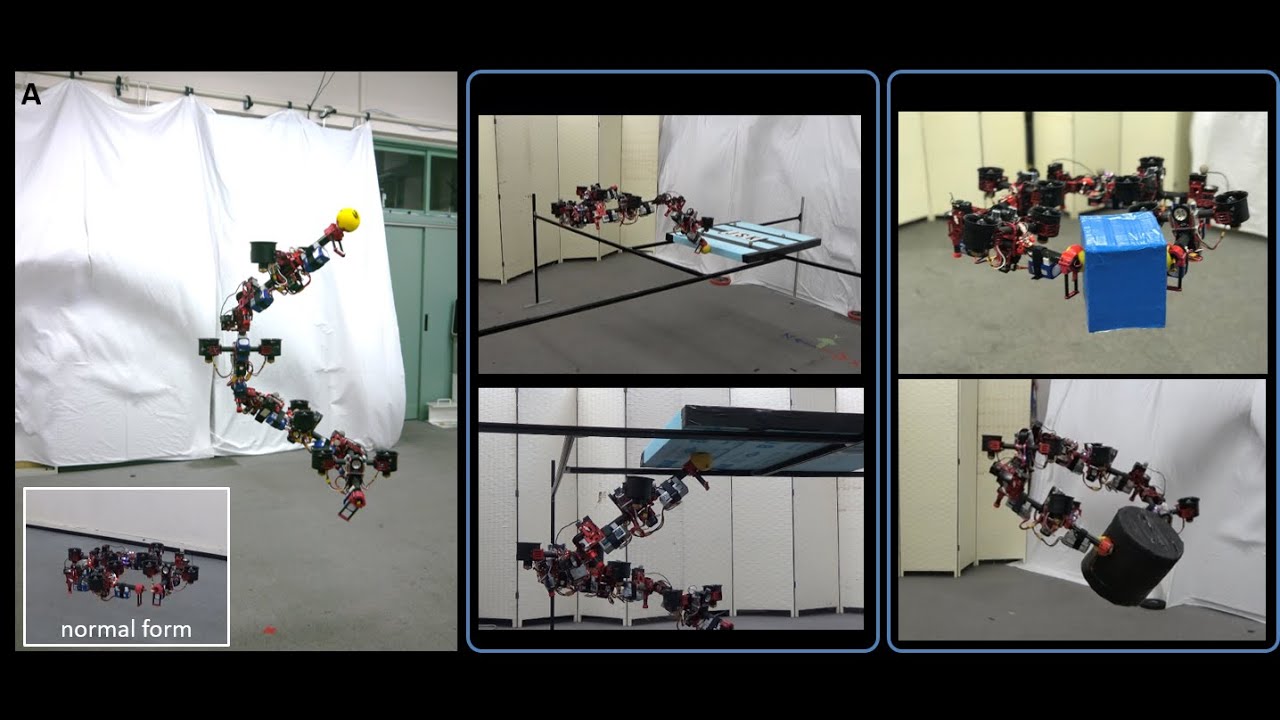
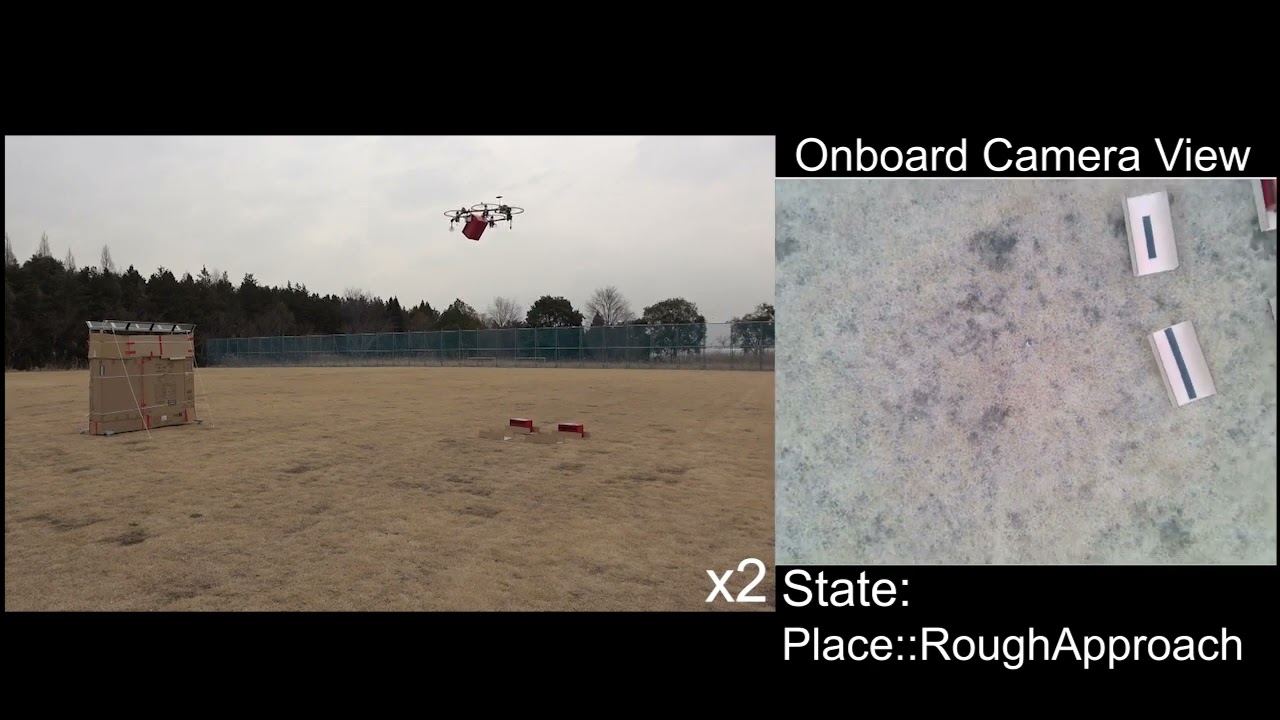
Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot
This is the video for a paper accepted by IEEE Robotics & Automation Magazine (RAM). Paper URL: https://ieeexplore.ieee.org/abstract/... Titile: Fully Autonomous Brick Pick and Place in Fields by Articulated Aerial Robot: Results in Various Outdoor Environments Author: T. Anzai, M. Zhao, T. Nishio, F. Shi, K. Okada and M. Inaba Abstract: Picking and placing of objects by aerial robots in fields is an important and challenging task for a range of outdoor activities, including industry and rescue operations. General strategies depend on the magnetic force to the pick object; however, this approach lacks both generality and robustness. Therefore, we focus on an articulated structure to grasp bricking. Another issue in performing pick-and-place tasks in fields is autonomous recognition using onboard sensors. In this article, we present a fully autonomous pick-and-place scheme in outdoor environments using articulated aerial robots. First, an articulated robot model with an actively tiltable sensor is developed to guarantee robustness in both state estimation and object detection. Second, object detection methods are designed according to the distance between the robot and target object. Third, a comprehensive motion strategy is developed to perform an autonomous object searching, picking, and placing sequence. In particular, a visual servoing method for robot position control is also proposed in this motion strategy to improve the robustness while approaching the target. Finally, we present the experimental results of autonomous brick picking and placing by our proposed methods in various outdoor environments, including a real robotics challenge, the 2020 Mohamed Bin Zayed International Robotics Challenge (MBZIRC 2020). To the best of our knowledge, our study represents the first successful attempt at fully autonomous object grasping by an articulated aerial robot in a field.
Comments