Interbotix Tutorials: IRROS | Overview скачать в хорошем качестве
Interbotix Tutorials: IRROS | Overview
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Interbotix Tutorials: IRROS | Overview в качестве 4k
У нас вы можете посмотреть бесплатно Interbotix Tutorials: IRROS | Overview или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Interbotix Tutorials: IRROS | Overview в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Interbotix Tutorials: IRROS | Overview
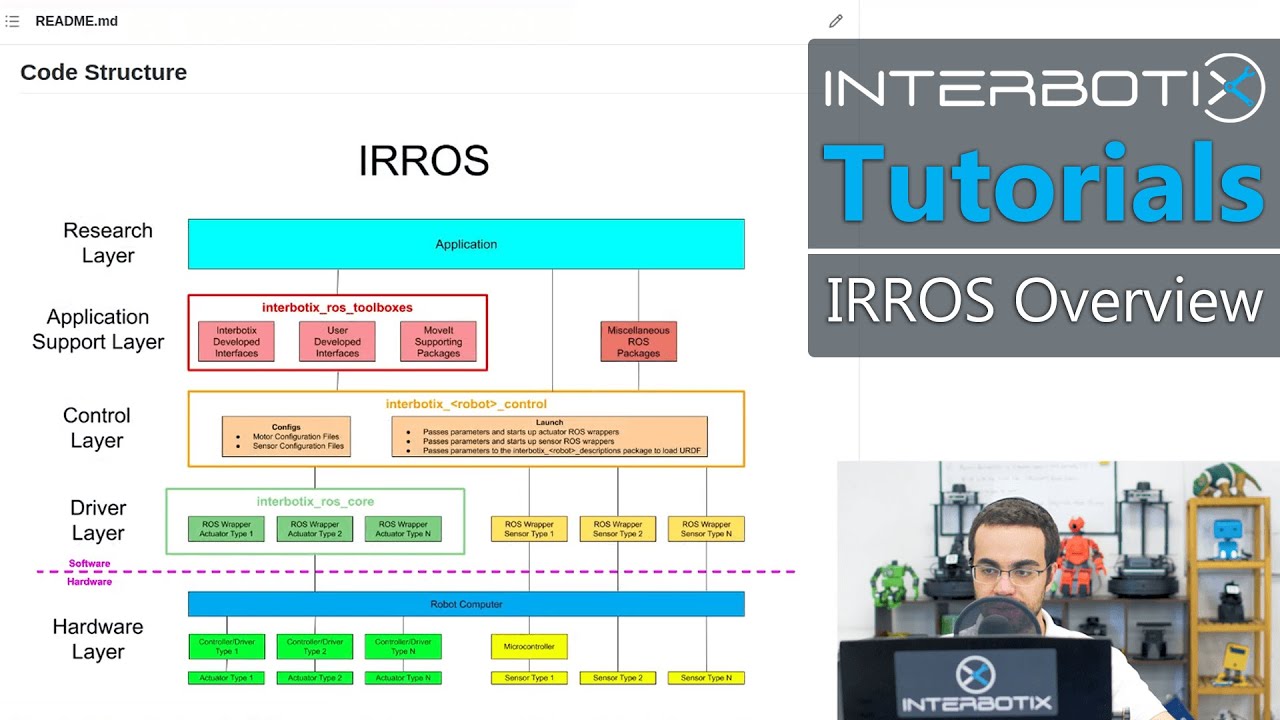
In this tutorial, you will be presented with a high level overview of the Interbotix Research Robotics Open Standard (IRROS). Designed at Interbotix, this is a method of structuring code that can be applied to any robotic platform - and which was used for all the robots in the repositories linked below. As a result, after becoming familiar with controlling one of our robots, you’ll know how to go about controlling any of them. In a nutshell, it starts with actuator/sensor specific ROS wrappers at the bottom, robot-specific ROS packages in the middle, and toolbox-level (small APIs and platform-independent code) software at the top. An example of the latter is our XSeries Python API. This layer abstracts away all ROS related code so that researchers with little to no ROS experience can focus on their research application instead of dealing with all the ‘plumbing code’ underneath. 0:00 Intro 1:09 Hardware Layer 2:09 Driver Layer 4:18 Control Layer 6:03 Application Support Layer 8:44 Research Layer 9:38 Flow Chart Explained 12:57 Conclusion Interbotix ROS Core Repo: https://github.com/Interbotix/interbo... Interbotix ROS Manipulators Repo: https://github.com/Interbotix/interbo... Interbotix ROS Turrets Repo: https://github.com/Interbotix/interbo... Interbotix ROS Crawlers Repo: https://github.com/Interbotix/interbo... Interbotix ROS Rovers Repo: https://github.com/Interbotix/interbo... Interbotix ROS Toolboxes Repo: https://github.com/Interbotix/interbo... Learn more about us: https://linktr.ee/interbotix
Comments