How we built humanoid robot legs скачать в хорошем качестве
How we built humanoid robot legs
2 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: How we built humanoid robot legs в качестве 4k
У нас вы можете посмотреть бесплатно How we built humanoid robot legs или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон How we built humanoid robot legs в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
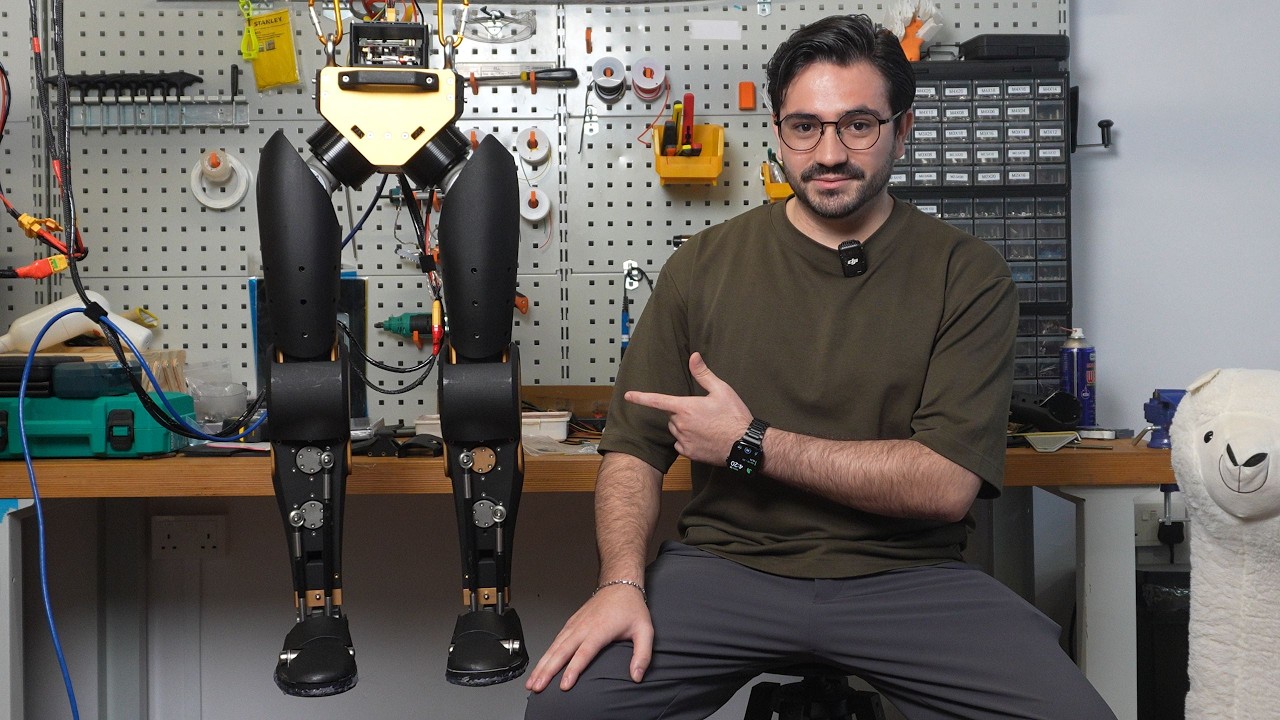
How we built humanoid robot legs
Alex walks through how we designed the Asimov legs from the ground up. Asimov is an open-source humanoid robot that you can modify. We started with human proportions scaled to 1.2m, then worked through actuator sizing, an iterative process of calculating worst-case torque loads, adding safety factors, and making sure the motors can handle the weight. We went with SLS 3D printing for complex geometries without weak points, combined with metal in high-stress areas. The ankle uses a revolute spherical universal joint for pitch and roll. The foot has an articulated toe, not actuated, but it gives more ground contact when pushing forward. Small detail, but it matters for locomotion. We're releasing the leg design files, simulation XMLs, and component specs soon. Check the links below to be notified about the release! 00:27: Step 1 01:38: Step 2 04:40: Step 3 06:58: Step 4 07:58: Asimov Ankles 09:29: Asimov Toes Technical blog including the research and motors & actuators list: https://news.asimov.inc/p/how-we-buil... Website: https://asimov.inc/ We open-sourced the leg design: https://github.com/asimovinc/asimov-v0/ Join the community: / discord Support the project: https://asimov.inc/early
Comments








![Мы получили 2,5 млн рублей чтобы сделать экзоскелет, и это наконец закончилось [2/2]](https://imager.clipsaver.ru/X3uZq2joiW8/max.jpg)