This Robot Won't Spill Your Drink! The Future of Humanoid Control is Here. скачать в хорошем качестве
This Robot Won't Spill Your Drink! The Future of Humanoid Control is Here.
4 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: This Robot Won't Spill Your Drink! The Future of Humanoid Control is Here. в качестве 4k
У нас вы можете посмотреть бесплатно This Robot Won't Spill Your Drink! The Future of Humanoid Control is Here. или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон This Robot Won't Spill Your Drink! The Future of Humanoid Control is Here. в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
This Robot Won't Spill Your Drink! The Future of Humanoid Control is Here.
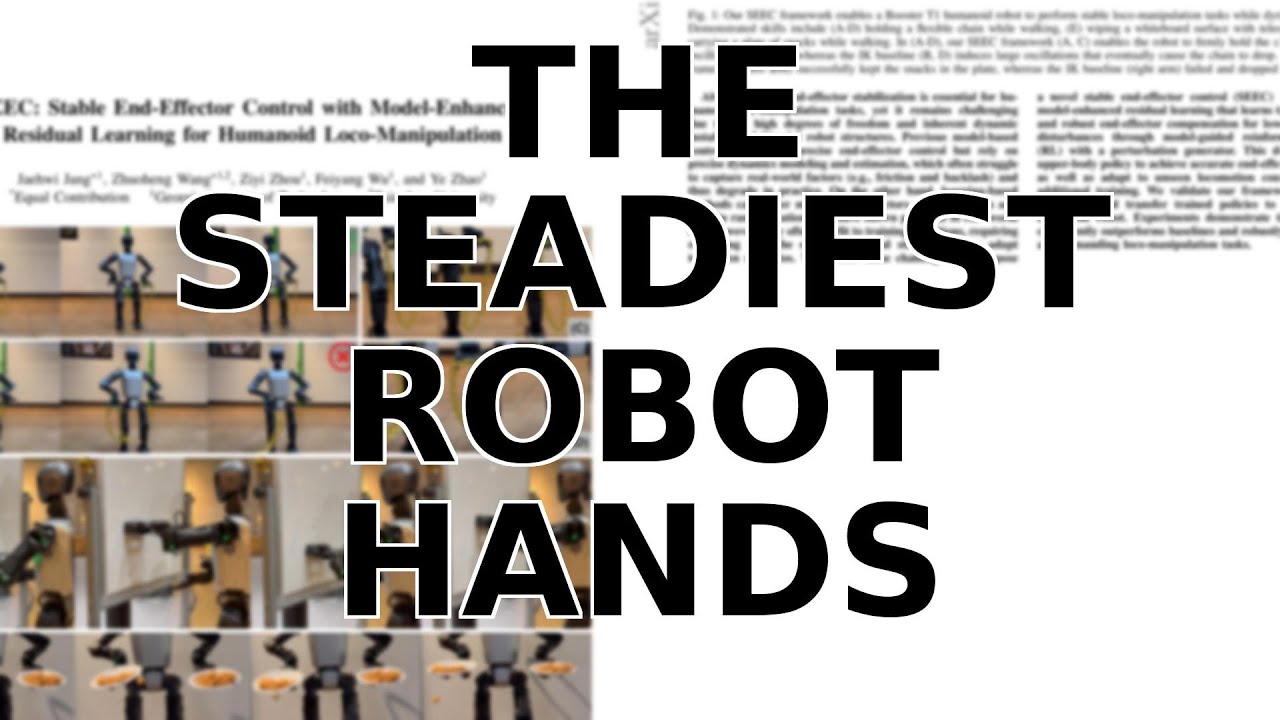
Humanoid robots have long struggled with a simple task: walking and using their hands at the same time without looking like they're in an earthquake. The movement from their legs creates massive instability in their arms, making it impossible to perform delicate tasks. A new paper from researchers at Georgia Tech and Tsinghua University introduces SEEC, a revolutionary framework that solves this problem. By combining classic physics models with a clever new AI training strategy, they've created a robot controller that has incredibly steady hands, even during dynamic motion. Instead of training the whole robot at once, they put the robot's upper body through a virtual 'shake simulator' to teach it how to stay stable against any kind of movement. We break down how this technology works and show you the incredible real-world results, where the robot carries snacks and holds delicate objects without dropping them. This breakthrough is a huge step towards robots that can work alongside us in warehouses, hospitals, and maybe one day, our homes. Cited paper: J. Jang et al. (2025). SEEC: Stable End-Effector Control with Model-Enhanced Residual Learning for Humanoid Loco-Manipulation. arXiv:2509.21231v1. http://arxiv.org/abs/2509.21231v1 Images shown are page renders from the paper PDF for commentary/education.
Comments
-
 2 часа назад
2 часа назад
-
 22 часа назад
22 часа назад
-
 22 часа назад
22 часа назад
-
 3 дня назад
3 дня назад
-
 4 дня назад
4 дня назад
-
 3 дня назад
3 дня назад
-
 2 дня назад
2 дня назад
-
 Трансляция закончилась 2 часа назад
Трансляция закончилась 2 часа назад
-
 5 дней назад
5 дней назад
-
 7 дней назад
7 дней назад
-
 3 часа назад
3 часа назад
-
 Трансляция закончилась 8 часов назад
Трансляция закончилась 8 часов назад
-
 3 дня назад
3 дня назад
-
 12 часов назад
12 часов назад
-
 7 дней назад
7 дней назад
-
 7 дней назад
7 дней назад
-
 2 дня назад
2 дня назад
-
 7 дней назад
7 дней назад
-
 7 дней назад
7 дней назад
-
 6 дней назад
6 дней назад