Autonomously Exploring and Mapping a Multi-storage Building with a Ground Vehicle скачать в хорошем качестве
Autonomously Exploring and Mapping a Multi-storage Building with a Ground Vehicle
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Autonomously Exploring and Mapping a Multi-storage Building with a Ground Vehicle в качестве 4k
У нас вы можете посмотреть бесплатно Autonomously Exploring and Mapping a Multi-storage Building with a Ground Vehicle или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Autonomously Exploring and Mapping a Multi-storage Building with a Ground Vehicle в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Autonomously Exploring and Mapping a Multi-storage Building with a Ground Vehicle
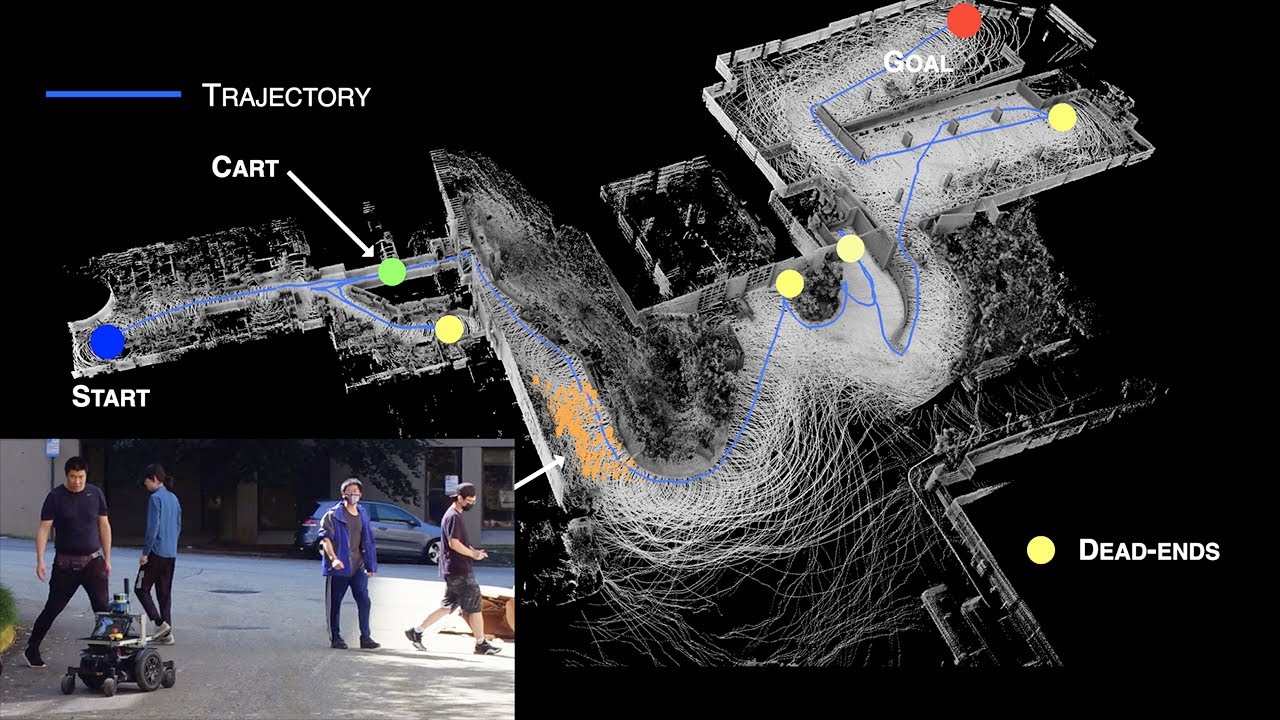
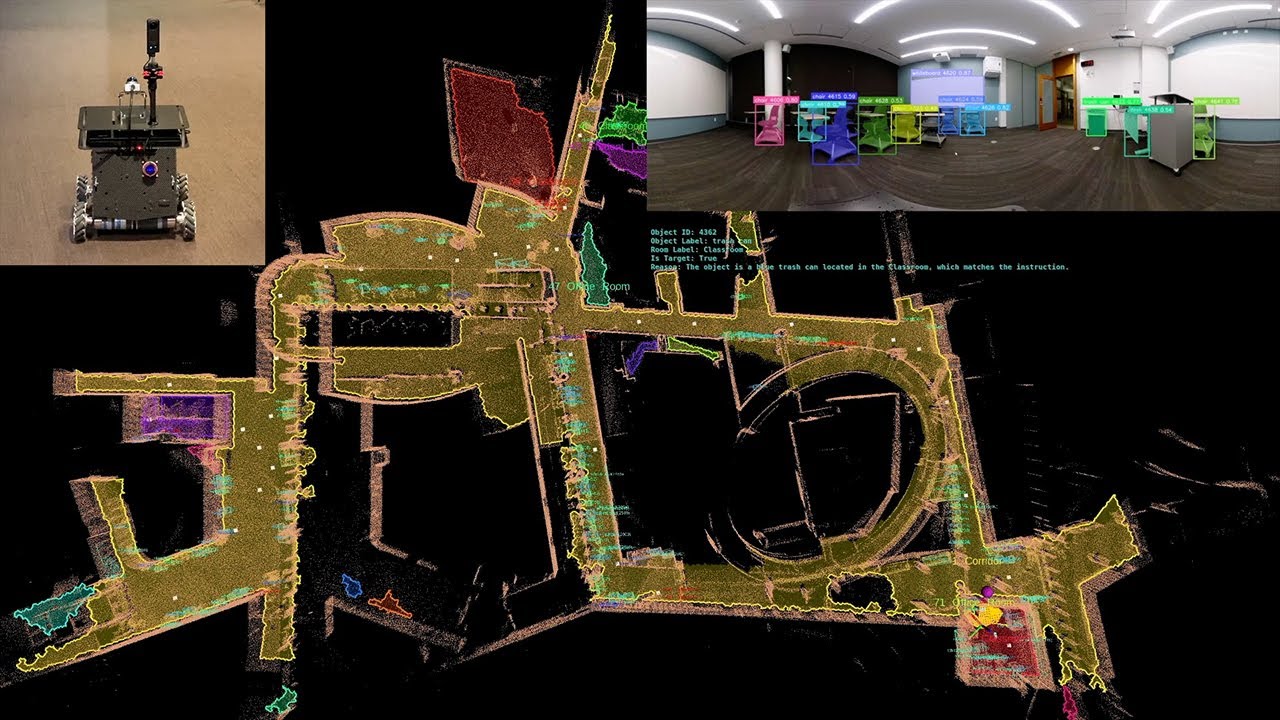
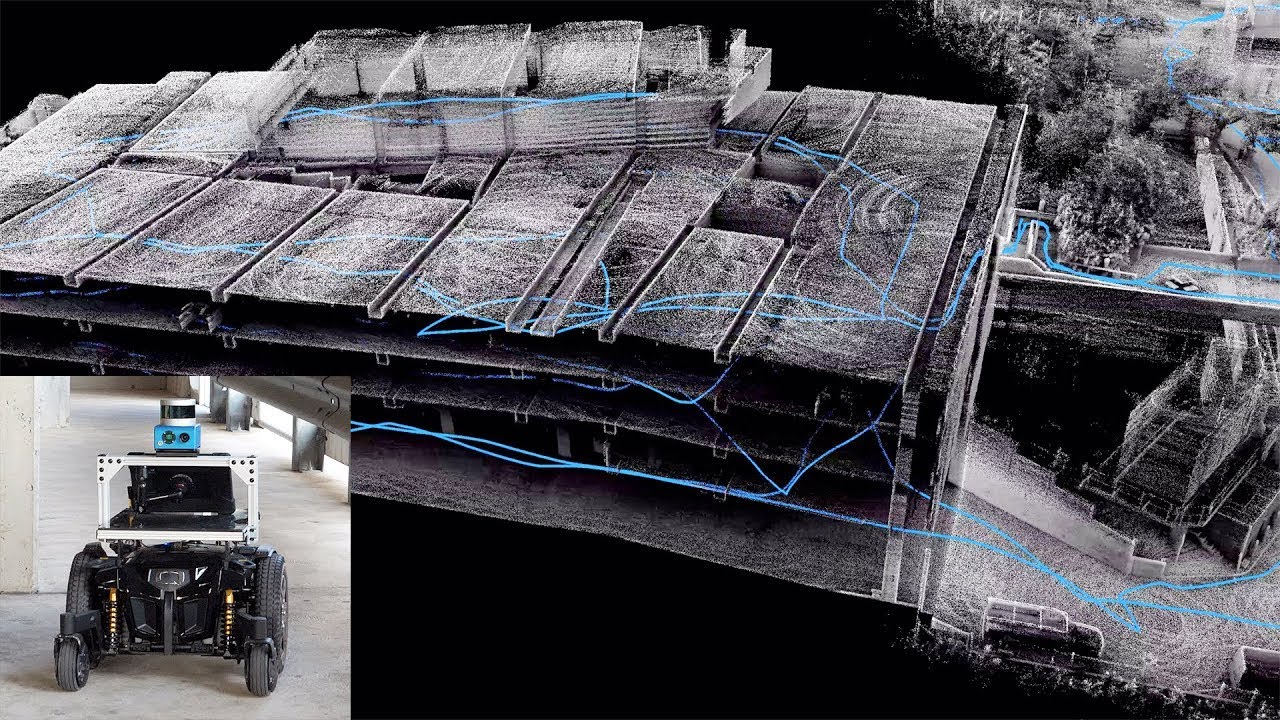
Video shows a ground vehicle autonomously exploring and mapping a multi-storage garage building and a connected patio on Carnegie Mellon University campus. The exploration algorithm uses a hierarchy, planning detailed paths within a local area surrounding the vehicle (green box) and at the same time keeping additional areas to explore (green blocks) on the global scale. The algorithm produces high efficiency in terms of time complexity and navigation patterns for exploration. The vehicle runs onboard state estimation and mapping leveraging range, vision, and inertial sensing, local planning for collision avoidance, and terrain analysis. All processing is real-time and no post-processing involved. The vehicle drives at 2m/s through the exploration run. This work was used by the CMU-OSU Team in attending DARPA Subterranean Challenge. Paper references: C. Cao, H. Zhu, Z. Ren, H. Choset, and J. Zhang. Representation Granularity Enables Time-Efficient Autonomous Exploration in Large, Complex Worlds. Science Robotics. vol. 8, no. 80, 2023. C. Cao, H. Zhu, H. Choset, and J. Zhang. TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments. Robotics: Science and Systems Conference (RSS). Virtual, July 2021. C. Cao, H. Zhu, F. Yang, Y. Xia, H. Choset, J. Oh, and J. Zhang. Autonomous Exploration Development Environment and the Planning Algorithms. IEEE Intl. Conf. on Robotics and Automation (ICRA). Philadelphia, PA, May 2022. J. Zhang, C. Hu, R. Gupta Chadha, and S. Singh. Falco: Fast Likelihood-based Collision Avoidance with Extension to Human-guided Navigation. Journal of Field Robotics. vol. 37, no. 8, pp. 1300–1313, 2020. J. Zhang and S. Singh. Laser-visual-inertial Odometry and Mapping with High Robustness and Low Drift. Journal of Field Robotics. vol. 35, no. 8, pp. 1242–1264, 2018. Autonomous Exploration Development Environment: https://www.cmu-exploration.com Ground-based Exploration - TARE Planner: https://www.cmu-exploration.com/tare-... Aerial Exploration - A-TARE Planner: https://www.cmu-exploration.com/a-tar... Author websites: http://caochao.me http://www.hongbiaoz.com http://www.cs.cmu.edu/~choset https://frc.ri.cmu.edu/~zhangji
Comments