RRT* for Manipulators скачать в хорошем качестве
RRT* for Manipulators
1 месяц назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: RRT* for Manipulators в качестве 4k
У нас вы можете посмотреть бесплатно RRT* for Manipulators или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон RRT* for Manipulators в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
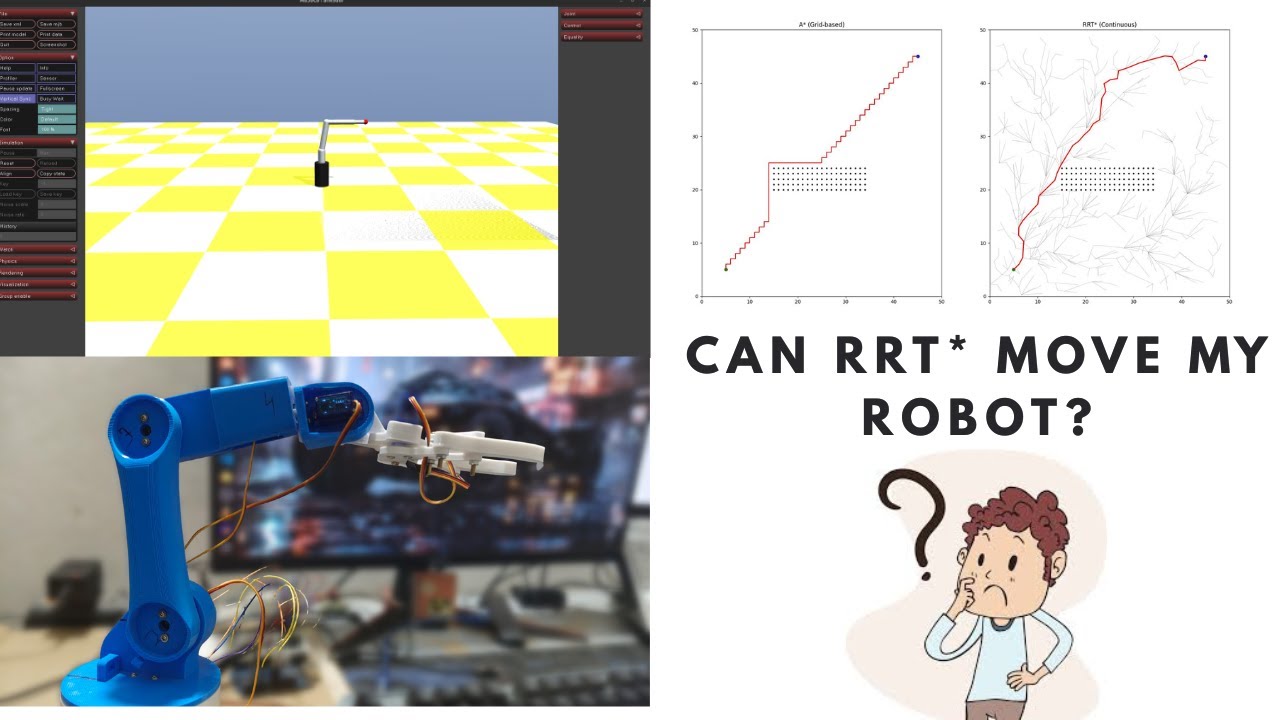
RRT* for Manipulators
Today I tested RRT* (Rapidly-exploring Random Tree Star) on my DIY 5-DOF robot manipulator using joint-space path planning. First I visualize RRT* in a toy 2D problem, where you can literally see the tree growing, rewiring, and improving the path over time. Then I move to my C++ implementation for my robot arm and execute the planned trajectory on real hardware. And yes… it crashed Because in this version, I did NOT include full collision checking yet — so this video also shows the real engineering reality: planning without collision checking is risky. ✅ Next video (Part 2): I’ll implement proper collision checking in joint space: link vs obstacle collision self collision edge validation between nodes and re-test the robot so it DOESN’T crash. If you want the code/repo or want me to cover smoothing + time parametrization next, comment below. 📌 Subscribe for more DIY Robotics + Motion Planning content. Music: bensound.com License code: OFHPQOK3JVGWDYWX Artist:: Vital Music: https://www.bensound.com License code: XBGH1MHA9OBMATDF Artist:: Marcus P.
Comments
-
 1 год назад
1 год назад
-
 13 дней назад
13 дней назад
-
 5 месяцев назад
5 месяцев назад
-
 2 недели назад
2 недели назад
-
 2 дня назад
2 дня назад
-
 1 месяц назад
1 месяц назад
-
 21 час назад
21 час назад
-
 2 дня назад
2 дня назад
-
 3 месяца назад
3 месяца назад
-
 6 месяцев назад
6 месяцев назад
-
 17 часов назад
17 часов назад
-
 1 день назад
1 день назад
-
 1 день назад
1 день назад
-
 3 дня назад
3 дня назад
-
 2 дня назад
2 дня назад
-
 Трансляция закончилась 6 дней назад
Трансляция закончилась 6 дней назад
-
 Трансляция закончилась 1 год назад
Трансляция закончилась 1 год назад
-
 Трансляция закончилась 12 часов назад
Трансляция закончилась 12 часов назад
-
 2 месяца назад
2 месяца назад
-
 13 дней назад
13 дней назад