$D^2$SLAM: decentralized and distributed collaborative visual-inertial SLAM скачать в хорошем качестве
$D^2$SLAM: decentralized and distributed collaborative visual-inertial SLAM
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: $D^2$SLAM: decentralized and distributed collaborative visual-inertial SLAM в качестве 4k
У нас вы можете посмотреть бесплатно $D^2$SLAM: decentralized and distributed collaborative visual-inertial SLAM или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон $D^2$SLAM: decentralized and distributed collaborative visual-inertial SLAM в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
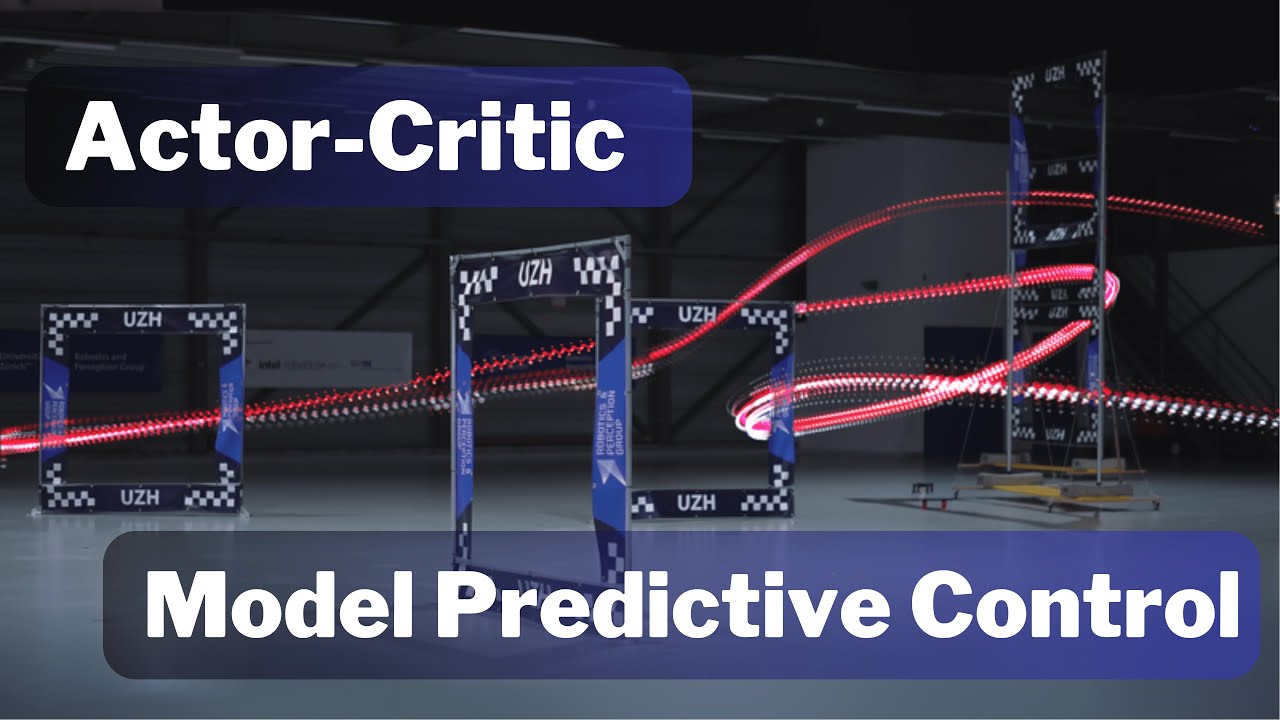
$D^2$SLAM: decentralized and distributed collaborative visual-inertial SLAM
A crucial technology in fully autonomous aerial swarms is collaborative SLAM (CSLAM), which enables the estimation of relative pose and global consistent trajectories of aerial robots. However, existing CSLAM systems do not prioritize relative localization accuracy, critical for close collaboration among UAVs. This paper presents $D^2$SLAM, a novel decentralized and distributed ($D^2$) CSLAM system that covers two scenarios: near-field estimation for high accuracy state estimation in close range and far-field estimation for consistent global trajectory estimation. We argue $D^2$SLAM can be applied in a wide range of real-world applications. Our pre-print paper is currently available at https://arxiv.org/abs/2211.01538 The open-source code will be release on https://github.com/HKUST-Aerial-Robot... very soon.
Comments