Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing (ICRA 2023) скачать в хорошем качестве
Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing (ICRA 2023)
1 год назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing (ICRA 2023) в качестве 4k
У нас вы можете посмотреть бесплатно Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing (ICRA 2023) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing (ICRA 2023) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing (ICRA 2023)
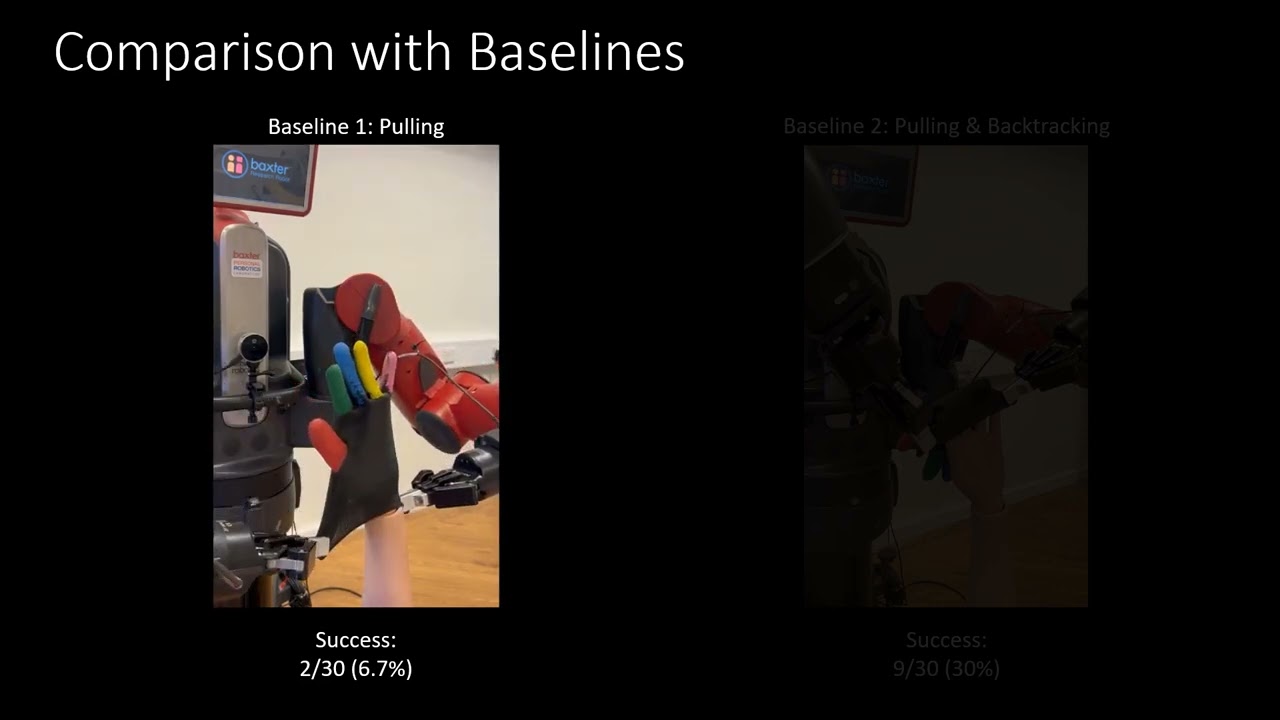
This is supplementary material for our ICRA'23 paper titled: "Bi-Manual Manipulation of Multi-Component Garments towards Robot-Assisted Dressing" by Stelios Kotsovolis and Yiannis Demiris {s.kotsovolis21,y.demiris}@imperial.ac.uk Paper: https://ieeexplore.ieee.org/document/... In this paper, we propose a strategy for robot-assisted dressing with multi-component garments, such as gloves. Most studies in robot-assisted dressing usually experiment with single-component garments, such as sleeves, while multi-component tasks are often approached as sequential single-component problems. In dressing scenarios with more complex garments, robots should estimate the alignment of the human body to the manipulated garments, and revise their dressing strategy. In this paper, we focus on a glove dressing scenario and propose a decision process for selecting dressing action primitives on the different components of the garment, based on a hierarchical representation of the task and a set of environmental conditions. To complement this process, we propose a set of bi-manual control strategies, based on hybrid position, visual, and force feedback, in order to execute the dressing action primitives with the deformable object. The experimental results validate our method, enabling the Baxter robot to dress a mannequin's hand with a gardening glove.
Comments

![[IROS '23] Bimanual Robot Shoe Lacing](https://imager.clipsaver.ru/vazYrF-KfXA/max.jpg)









![[4K FULL HD] Relaxing Water Background | 1 HOUR | Calm Water Wallpaper (No Sound)](https://imager.clipsaver.ru/y9PTNTSpGJs/max.jpg)