Conexión final de motores al Puente H (L298N) | TurboBot 4x4 Arduino (E04) скачать в хорошем качестве
Conexión final de motores al Puente H (L298N) | TurboBot 4x4 Arduino (E04)
2 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Conexión final de motores al Puente H (L298N) | TurboBot 4x4 Arduino (E04) в качестве 4k
У нас вы можете посмотреть бесплатно Conexión final de motores al Puente H (L298N) | TurboBot 4x4 Arduino (E04) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Conexión final de motores al Puente H (L298N) | TurboBot 4x4 Arduino (E04) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
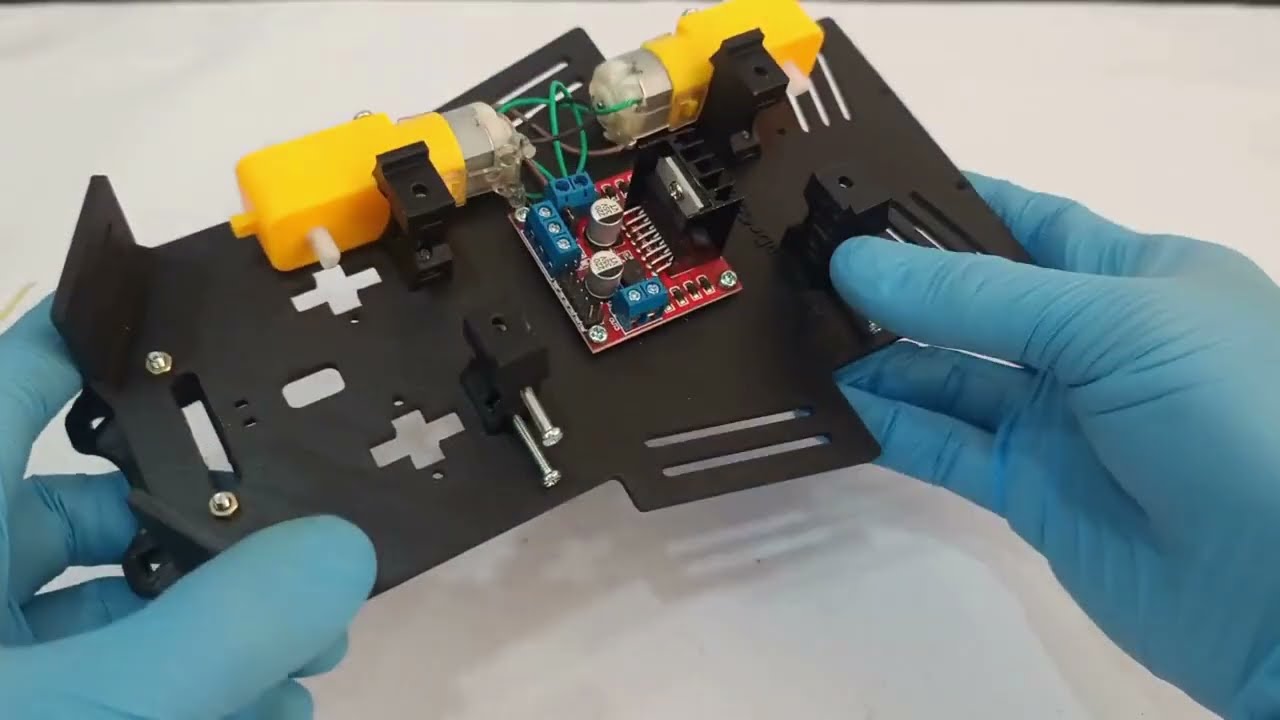
Conexión final de motores al Puente H (L298N) | TurboBot 4x4 Arduino (E04)
En este tutorial paso a paso del Carro Robot TurboBot 4x4 (Arduino) realizamos la conexión de los 2 motores DC restantes al puente H / driver L298N, dejando el sistema de tracción completamente cableado y listo para el siguiente paso: alimentación segura del robot. En este video vas a aprender: • Cómo identificar los dos motores faltantes (posición y lado del chasis) • Cómo conectarlos correctamente a las salidas del L298N (sin confusión de canales) • Regla rápida para corregir sentido de giro si un motor queda invertido • Cómo dejar el cableado ordenado y sin tensión para evitar fallas en movimiento Tip rápido: si el carro avanza al revés o gira cuando debería ir recto, la solución más común es invertir la polaridad del motor (cambiar los dos cables en la salida del L298N). Siguiente en la serie TurboBot (E05): • Conexión de la fuente de alimentación (voltaje recomendado, distribución y seguridad) • Luego: Driver ↔ Arduino + pruebas de movimiento • Después: Programación desde cero (control, pruebas y mejoras) Capítulos (tabla de contenidos) 00:00 Introducción y Bienvenida a Robótica de Colombia 00:20 Instalación del Pin RDC (Orientación y ajuste) 00:45 Regla de Oro: Orientación de Motores y Cables 01:10 Montaje Técnico con tornillos M3x12 01:40 Instalación Motor Trasero y Despedida Tienda oficial: roboticadecolombia.com (busca “TurboBot”) Soporte/ventas WhatsApp: +57 320 263 0996 ##Arduino #CarroRobot #RoboticaEducativa
Comments