Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05) скачать в хорошем качестве
Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05)
2 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05) в качестве 4k
У нас вы можете посмотреть бесплатно Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
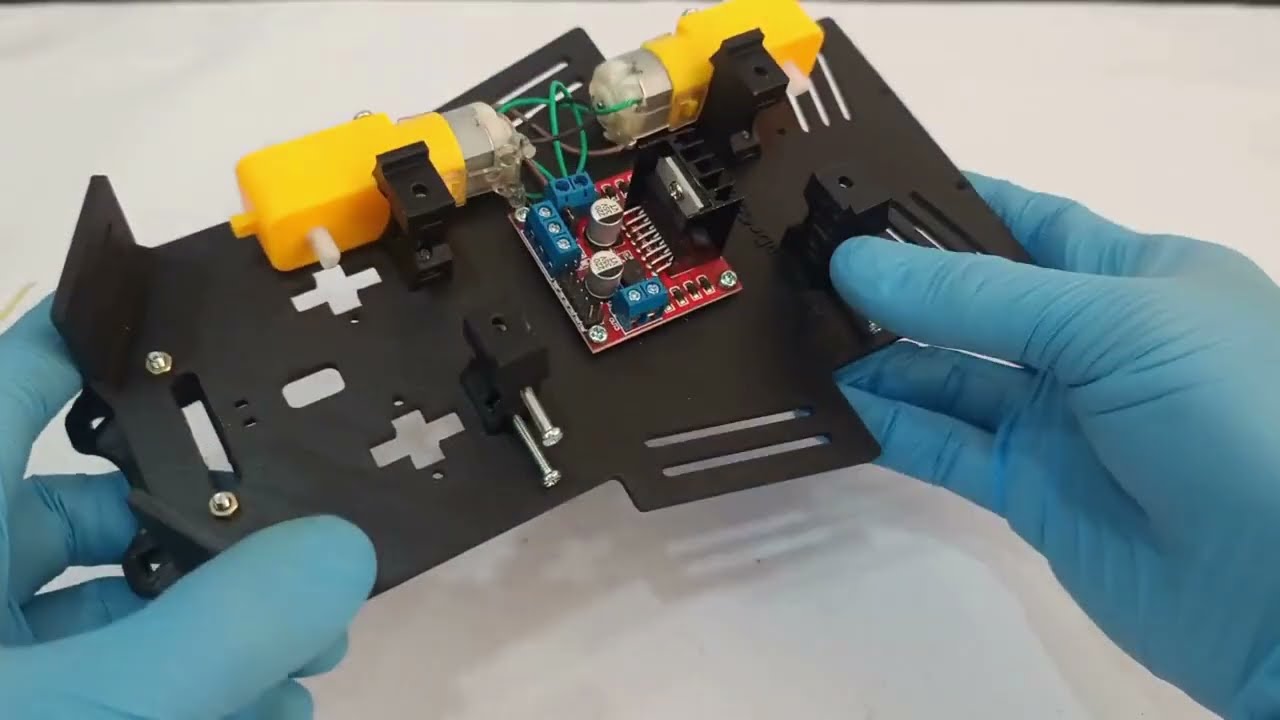
Instalación del Sensor QTR-8A (Seguidor de Línea) en la Base | TurboBot 4x4 Arduino (E05)
En este tutorial paso a paso del Carro Robot TurboBot 4x4 (Arduino) instalamos el sensor QTR-8A (seguidor de línea) en la base del chasis, dejándolo alineado y a la altura correcta para que más adelante puedas hacer calibración y programación sin dolores de cabeza. Si estás construyendo un carro seguidor de línea “de verdad”, este video es clave porque aquí se define: • Posición y centrado del QTR-8A (para lecturas estables) • Altura correcta del sensor respecto al piso (evita falsos positivos) • Montaje firme + organización de cables (sin vibraciones ni roces) Siguiente en la serie TurboBot (E06): • Conexión del sensor a Arduino + lectura de valores • Calibración del QTR-8A y base para el código seguidor de línea Consigue el TurboBot y repuestos en la tienda oficial: roboticadecolombia.com (busca “TurboBot”) Soporte/ventas WhatsApp: +57 320 263 0996 Capítulos (tabla de contenidos) 00:00 Introducción + objetivo (QTR-8A en la base) 00:12 Qué es el QTR-8A y para qué sirve (seguidor de línea) 00:28 Ubicación ideal en el chasis (centrado y orientación) 00:50 Montaje del sensor en la base (fijación y tornillería) 01:20 Ajuste de altura y alineación (lo que evita errores) 01:48 Organización de cables (ruta limpia y segura) 02:03 Resultado final + qué sigue (conexión y programación) #TurboBot #Arduino #QTR8A #SeguidorDeLinea #RoboticaEducativa #RoboticaDeColombia
Comments