ULAD2022 - Claudius Glaeser (Robert Bosch GmbH) скачать в хорошем качестве
ULAD2022 - Claudius Glaeser (Robert Bosch GmbH)
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: ULAD2022 - Claudius Glaeser (Robert Bosch GmbH) в качестве 4k
У нас вы можете посмотреть бесплатно ULAD2022 - Claudius Glaeser (Robert Bosch GmbH) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон ULAD2022 - Claudius Glaeser (Robert Bosch GmbH) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
ULAD2022 - Claudius Glaeser (Robert Bosch GmbH)
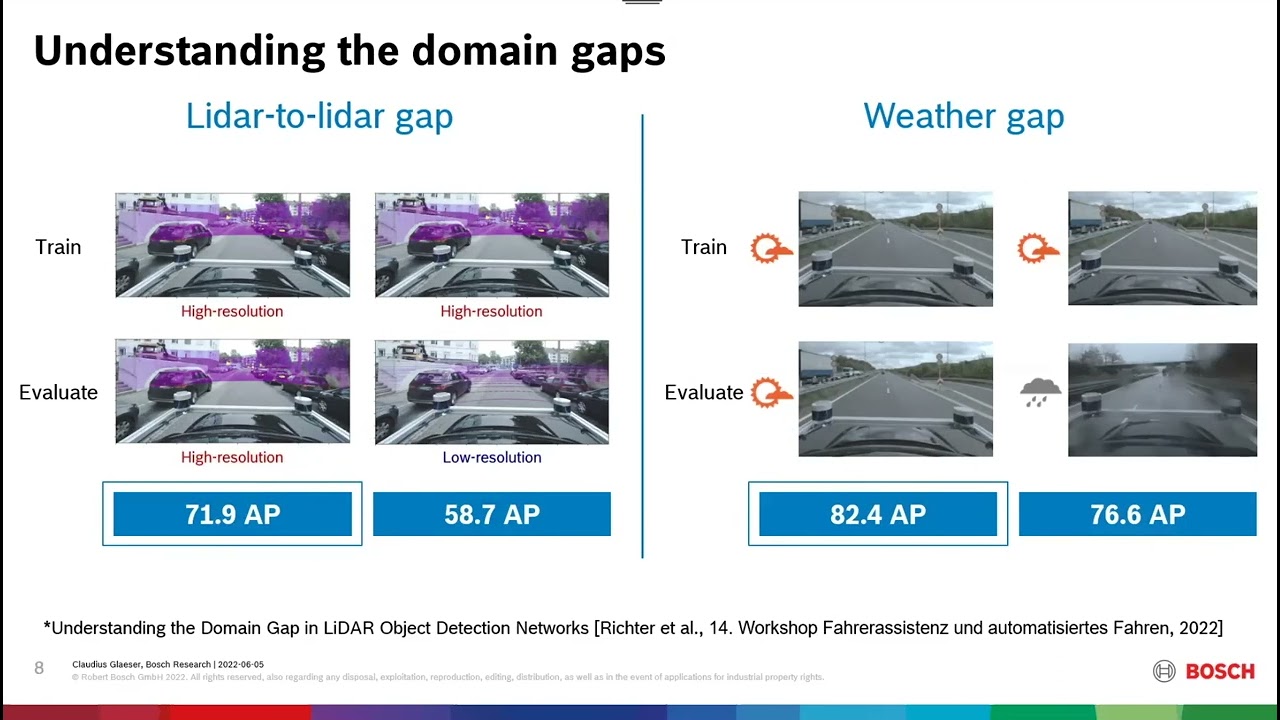
Talk title: Bridging domain gaps in lidar perception Presenter: Claudius Glaeser (Robert Bosch GmbH) Recorded on Sunday, June 5, 2022, in Aachen, Germany. The 3rd workshop on Unsupervised Learning for Automated Driving (ULAD) at the IEEE Intelligent Vehicles Symposium 2022. http://intelligent-vehicles.org/ulad-... Abstract. To make autonomous driving a reality, autonomous vehicles will have to work robustly in the diverse and constantly changing open world in which we live. However, it is not technically feasible to collect and annotate training datasets which accurately represent this open-world domain. Therefore, we must find ways to deal with domain gaps due to changing weather conditions, updates in sensor hardware, different geographical locations and so on. In this presentation, we demonstrate how to bridge domain gaps between high-resolution and low-resolution lidar sensors and good and bad weather conditions using three different domain adaptation approaches. We show that both unsupervised and self-supervised domain adaptation approaches operating on the feature level or data level are effective at bridging domain gaps. Dr. Claudius Glaeser leads a research group on perception for automated driving at Bosch Research in Renningen, Germany. He received his PhD degree in computer science from Bielefeld University, Germany, in 2012. From 2006 he was a Research Scientist with the Honda Research Institute Europe GmbH, Offenbach/Main, Germany, working in the fields of speech processing and language understanding for humanoid robots. In 2011, he joined Robert Bosch GmbH, where he developed perception algorithms for various driver assistance and highly automated driving functions. His research interests include multimodal perception and data fusion for autonomous systems.
Comments




![Как происходит модернизация остаточных соединений [mHC]](https://imager.clipsaver.ru/jYn_1PpRzxI/max.jpg)