Optical rotary absolute encoder tutorial скачать в хорошем качестве
Optical rotary absolute encoder tutorial
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Optical rotary absolute encoder tutorial в качестве 4k
У нас вы можете посмотреть бесплатно Optical rotary absolute encoder tutorial или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Optical rotary absolute encoder tutorial в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Optical rotary absolute encoder tutorial
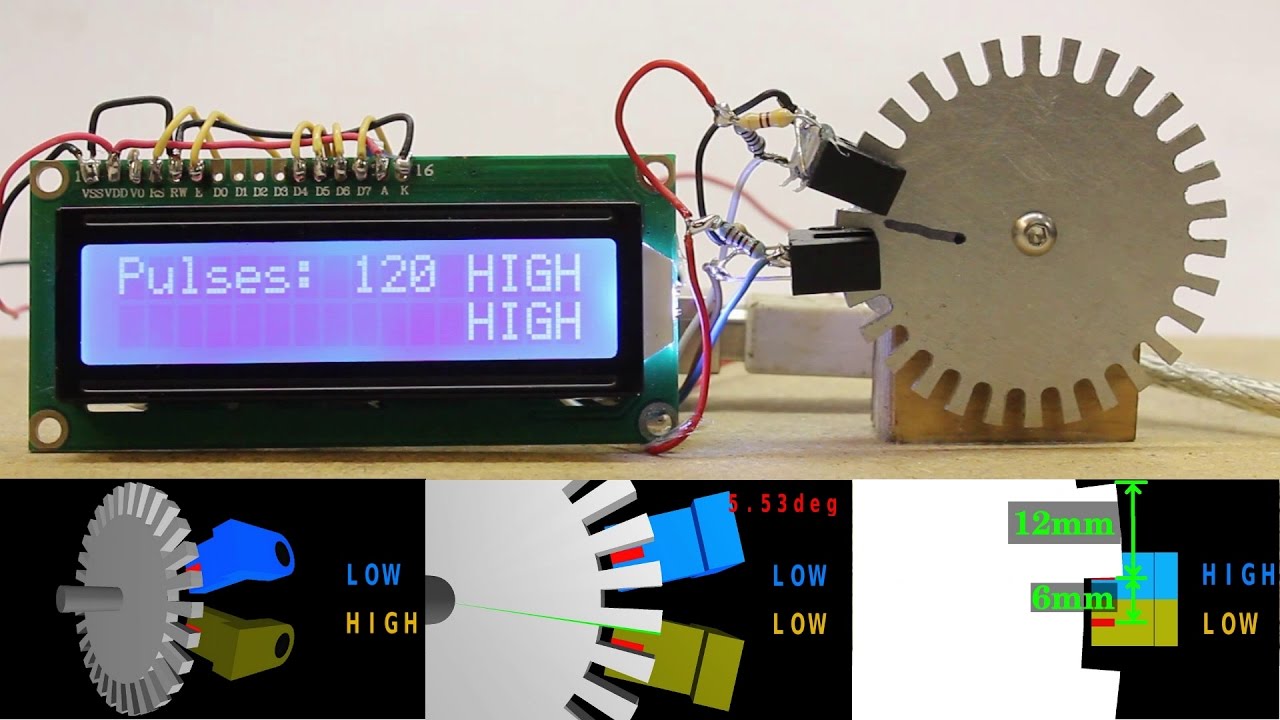
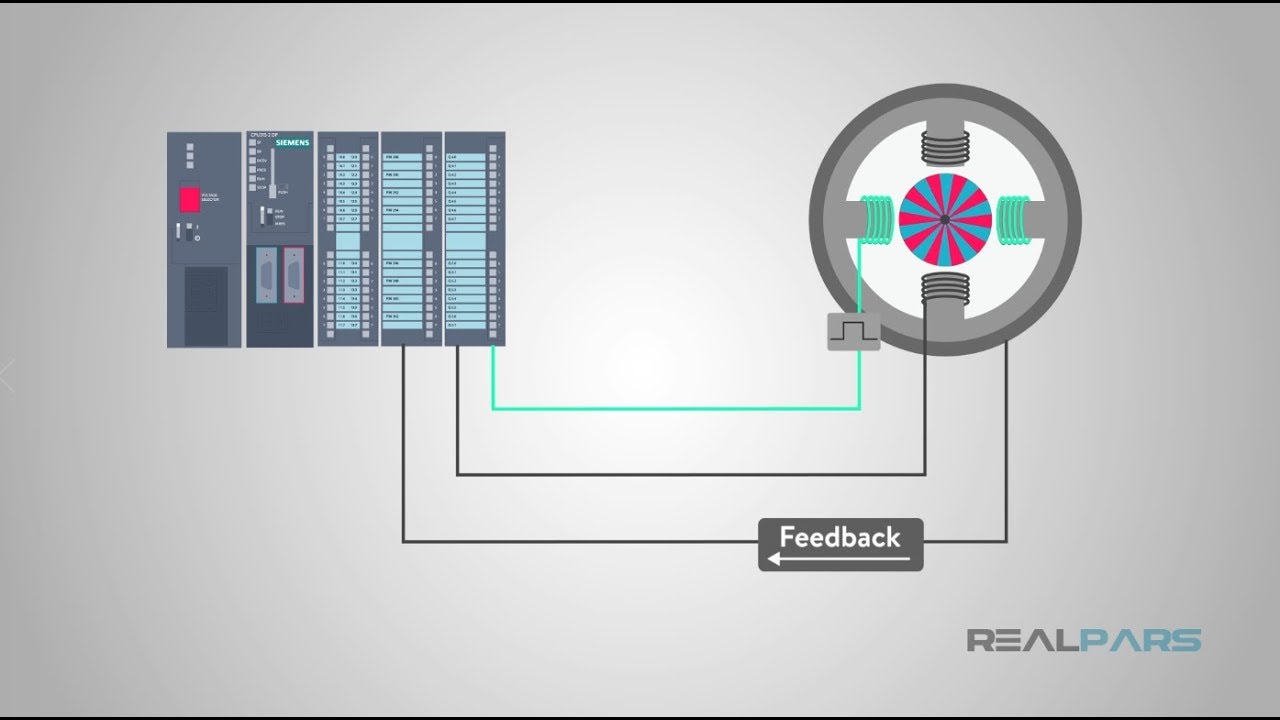
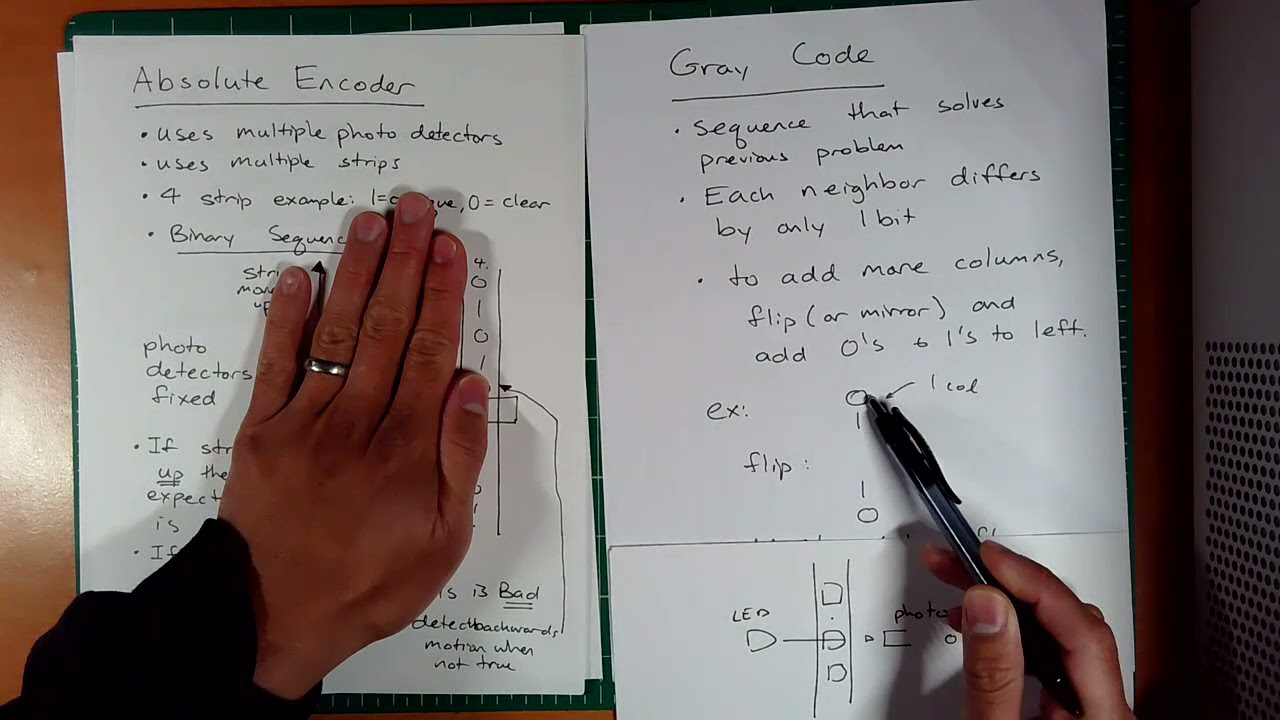
This optical encoder tutorial is the absolute encoder tutorial. Learn more about automation control at http://koldwater.com Sometimes referred to as encoder motor (motor with rotary encoder attached) or linear encoder, this video will give you the absolute encoder working principle and absolute encoder basics. Transcript: Absolute encoders are used in many applications that require speed, position, angular displacement and directional feedback. An encoder is a device that converts linear or rotary movement into digital or pulse signals. The most common type of feedback device is the absolute optical encoder. An absolute encoder consists of the four major components ... A rotating encoder disc A light source such as an LED A photo detector as the light sensor A signal conditioner that converts the signals into square wave form The encoder disk consists of a series of opaque and transparent tracks mounted to a rotating shaft. The tracks of the disk are arranged concentricly around the center of the shaft. Photo detectors assigned to each track and designate the resolution of the encoder. The higher the number of concentric tracks, the higher the accuracy. A light source located on the opposite side of the photo cells passes light through a capture plate. As the encoder disk rotates, light is either transmitted or blocked according to the pattern. The received light provides a four-bit word that indicates position of the actuator or device that the encoder is mounted to. The most common types of numerical encoding are decimal binary and gray code. In a 4-bit encoder there are 16 unique combinations or numeric code every 22.5 degrees. Gray coad is designed where only one bit is changes at a time, contrary to a binary system where one or more numbers change in the word. By changing more than one number of the word at a time in the binary system, the possibility of positioning errors is greater, leaving gray code the preference in precision applications for robot applications. Absolute encoders are commonly used for precise positioning operations. The actuator in the video example, demonstrates the function of the absolute encoder in operation. As the actuator moves to push the carton in the video, the encoder provides feedback that it has reached the user-defined position. The actuator then moves back to the home position, verified by the encoder and completing the cycle. Using feedback devices closes the loop in motion control systems.
Comments